

Device and method for composition based on small quad-rotor unmanned aerial vehicle
A quadrotor UAV and UAV technology, applied in three-dimensional position/channel control, etc., can solve the problems of application value and use range limitation, high computer requirements, movement range limitation, etc., to achieve accurate and fast map construction, The effect of flexible environment reconnaissance and fast movement speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] An embodiment of the present invention will be further described below in conjunction with the accompanying drawings.
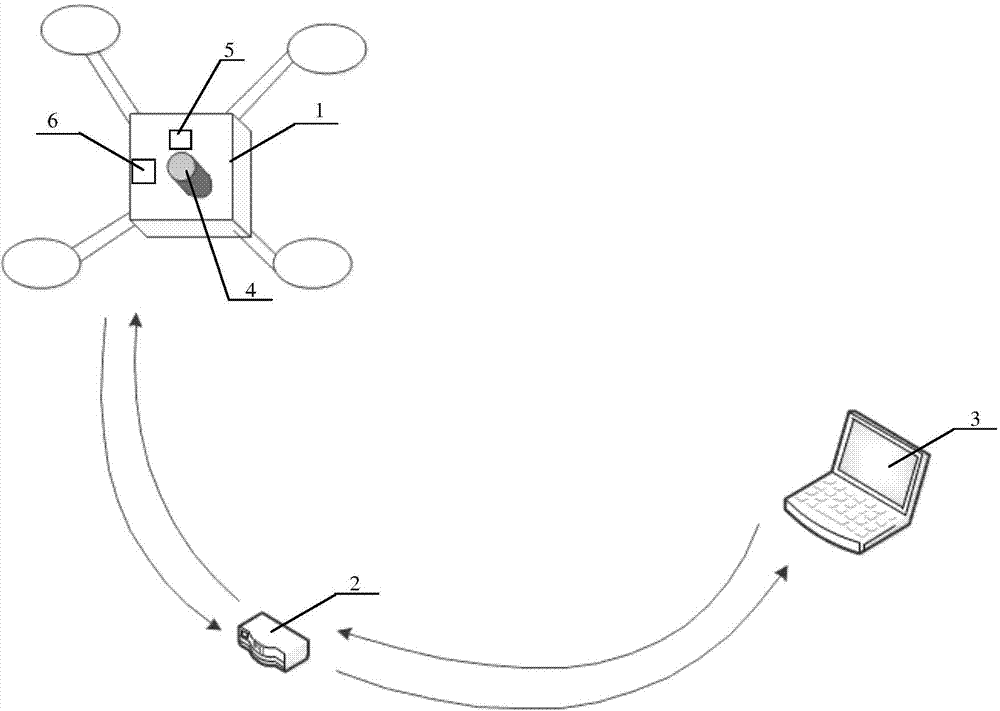
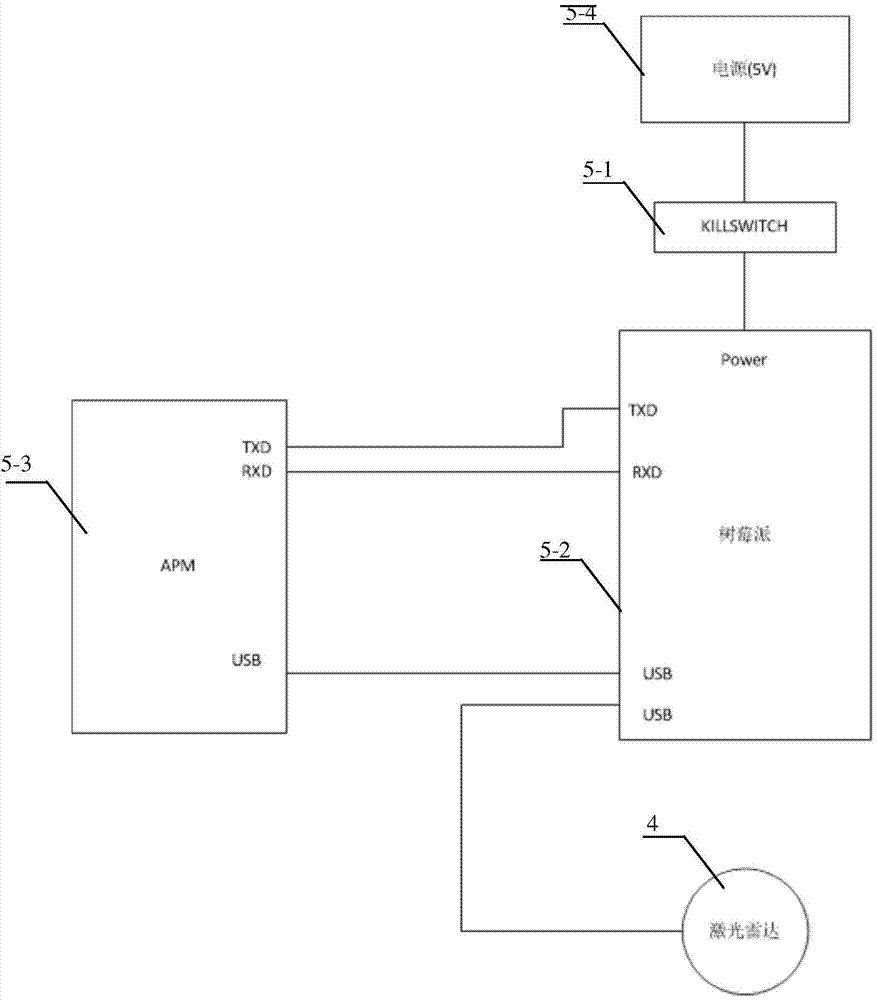
[0036] like figure 1 As shown, in the embodiment of the present invention, a composition device based on a small quadrotor UAV includes a quadrotor UAV 1, a laser radar 4, a wireless router 2, a mirror 6, and a PC 3, such as figure 2 As shown, the remote control switch 5-1, the on-board computer 5-2, the controller 5-3 and the power supply 5-4, wherein the laser radar 4 is arranged at the center position of the upper end of the quadrotor UAV 1, and the mirror 6. It is set at the position opposite to the initial position of the transmitting end of the laser radar 4, and the angle between it and the plane of the quadrotor UAV 1 is 45°. The remote control switch 5-1, the onboard computer 5-2, and the controller 5-3 and power supply 5-4 constitute the airborne control part 5, which is arranged at the center of the quadrotor UAV 1.
[0037]In the embodim...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More