Route sign planning method of deep space detection autonomous navigation
A technology of autonomous navigation and deep space exploration, applied in the field of satellite navigation, can solve the problems of real-time, cost and resource constraints, and achieve the effect of simple implementation and small amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
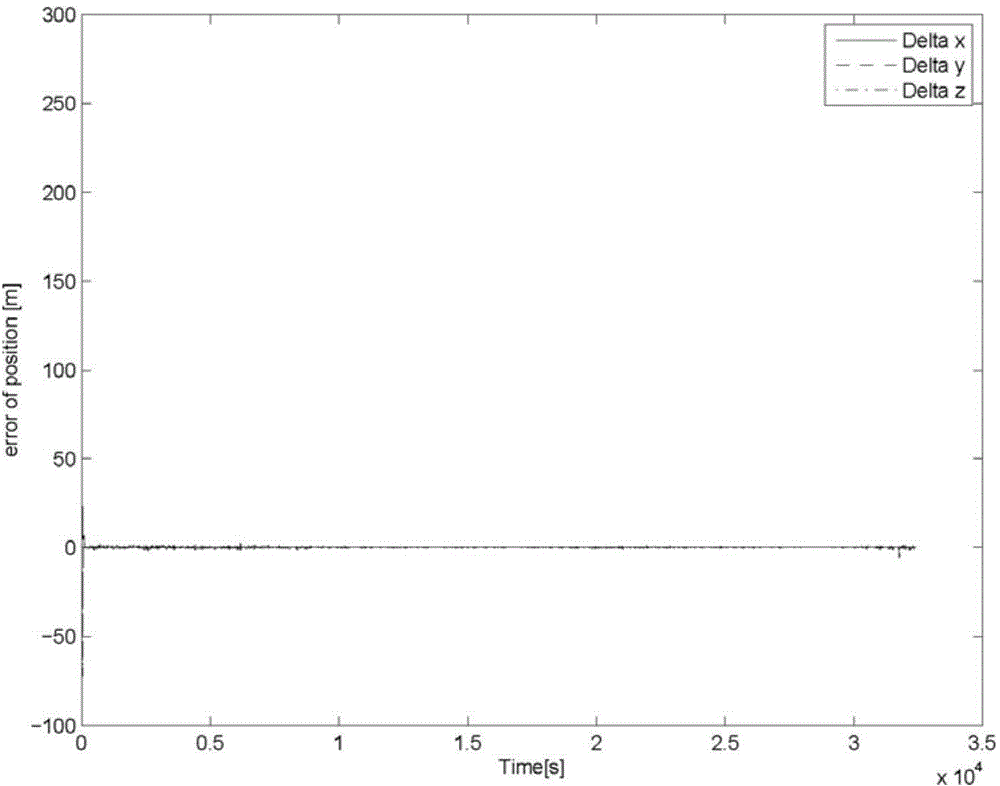
[0068] The target celestial body is asteroid 25413, and the six elements of the detector orbit are selected as a=0.75km, e=1 / 3, i=π / 2, ω=π, RAAN=0, f=π, and the detector distance is small at the beginning The distance from the center of the planet is 1km, and after flying half a circle, the distance is reduced to around 500m, and then active control is carried out there, so that it descends to the surface of the asteroid at a constant speed.
[0069] During navigation, landmark observation is performed every 30s. The position error 1σ of the landmark point is set to 15m, the Euler angle noise 1σ is 1e-5rad, the pixel noise 1σ is 8.801e-5, the initial position error of navigation is 300m in each direction, and the speed error is 0.02m / s.
[0070] Simulation results (such as figure 2 (shown) shows that when the filtering is converging, the navigation accuracy can reach the meter level.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com