

A method and device for estimating the position of a moving target based on time series pseudorange difference
A pseudo-range difference and moving target technology, applied in the field of positioning and navigation, navigation and positioning, can solve the problems of adding devices, poor measurement accuracy, and increased difficulties, and achieve the goals of reducing cumulative errors, improving measurement accuracy, and high position calculation accuracy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0060] Example 1: Timing Pseudorange Difference Simulation Calculation
[0061] 1), the purpose of simulation
[0062] In order to verify the principle and performance of the time-series pseudo-range difference method, simulation calculations are carried out using the measured satellite and user coordinate data.
[0063] 2), simulation steps
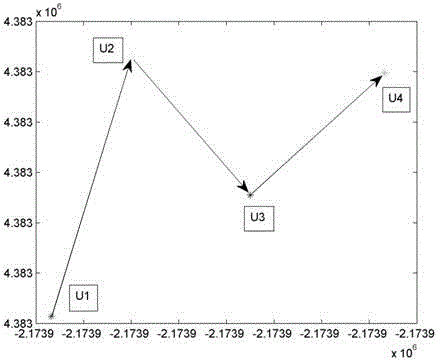
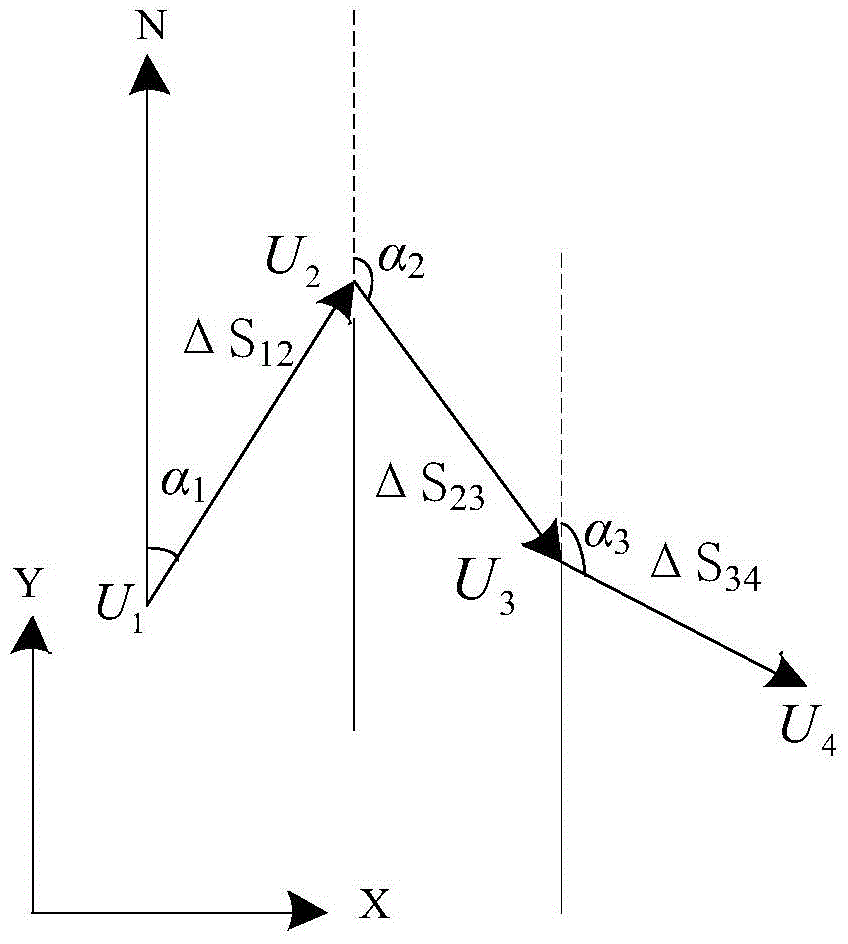
[0064] (1). Four user points were selected in the actual measurement, as shown in the attached Figure 15 shown. The user travels from U1 location to U2, U3, U4 respectively. After coordinate projection, it can be calculated that the azimuth angles of the three true north directions between U1 and U2, U2 and U3, and U3 and U4 are: 52.43°, 87.90°, and 46.82°, respectively.
[0065] (2). Select a GPS satellite with a suitable elevation angle. Its three-dimensional coordinates at U1, U2, U3, and U4 moments are:
[0066] S1=[6085376.3118885652.92 17967531.59]
[0067] S2=[6085133.37 18885532.38 17967735.53]
[0068] S3=[6084890.44 18...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More