

Multi-mobile-robot cooperation positioning method based on filtering of MAPSO particle optimization filtering
A mobile robot, cooperative positioning technology, applied in two-dimensional position/channel control and other directions, can solve the problems of high target dimension, many extremum values of the target function, and it is difficult to accurately converge to the global optimal value.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0019] A non-limiting embodiment is given below in conjunction with the accompanying drawings to further illustrate the present invention.
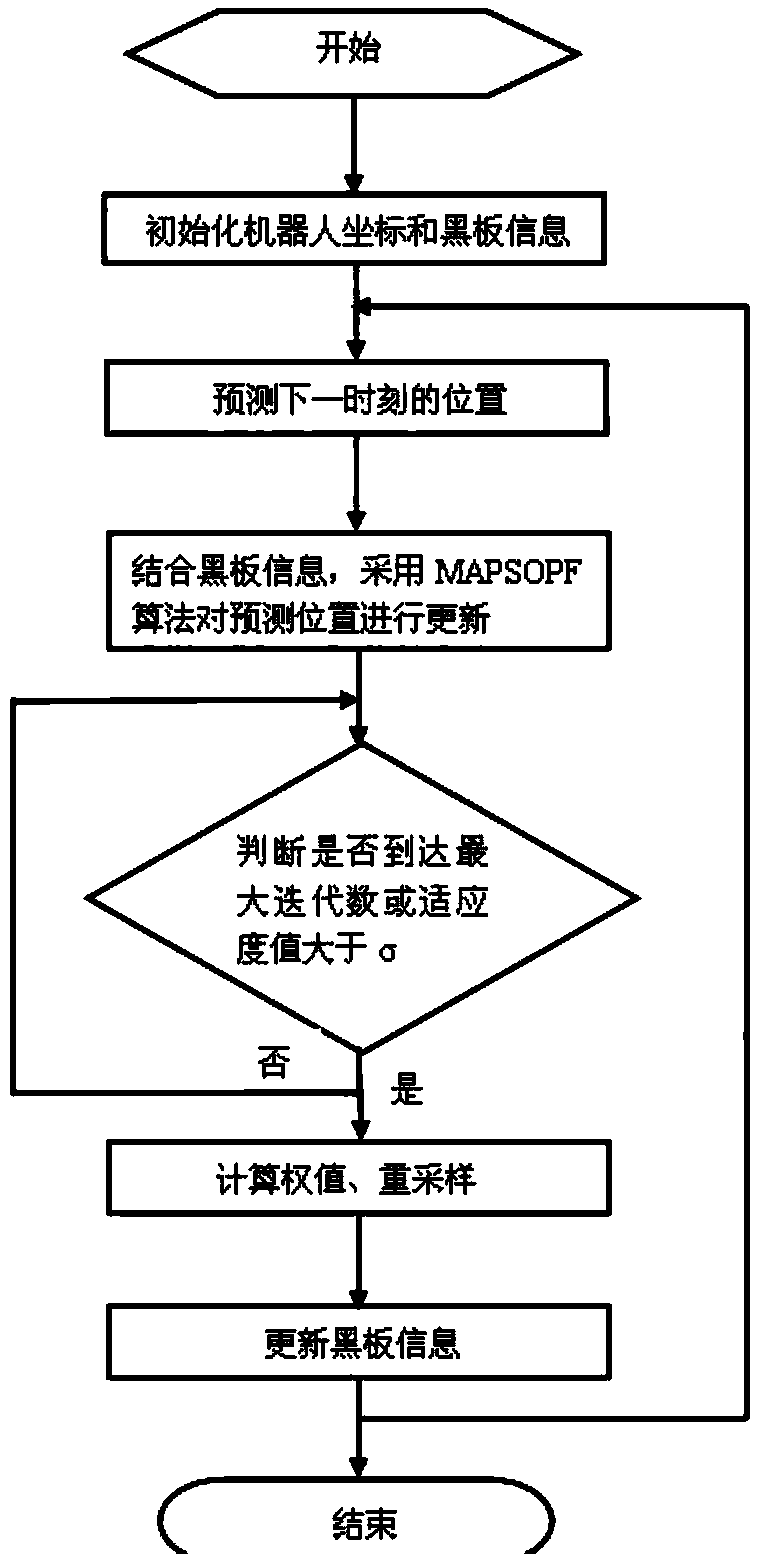
[0020] refer to figure 1 As shown, the present invention uses the method of combining the complete network structure and the blackboard mechanism to realize the cooperative positioning task of multi-robots in the static environment, and the specific implementation steps are as follows:
[0021] Step 1: Abstract the actual operating environment into a plane map, and build an environment map based on the location of the landmarks and the path of the robot. Mark road signs with ID numbers so that robots can detect road sign information.
[0022] Step 2: According to the environment information obtained in step 1, initialize the simulation environment, robot position information and blackboard information. Arbitrarily set 8 landmark locations on the map, and set the path of each robot at the same time. Initialize the particle swarm as a 3*...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More