

Distributed pedestrian detection system and method based on mobile robot platform
A mobile robot and pedestrian detection technology, applied in resource allocation, multi-program device, etc., can solve problems such as difficult to distinguish pedestrians, and achieve good human-computer interaction effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
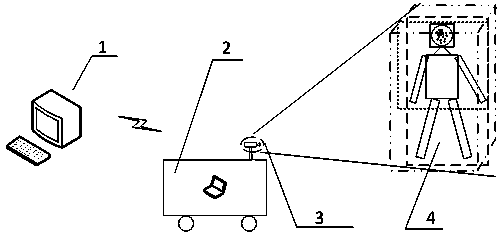
[0026] see figure 2 , the distributed pedestrian detection system based on the mobile robot platform, including a desktop computer (1) and a Kinect XBOX360 camera (3) of Microsoft Corporation, is characterized in that: the desktop computer (1) is wirelessly connected to a mobile computing controller ( 2), the Kinect XBOX360 camera (3) of Microsoft Corporation is installed on the mobile robot, connected to the mobile robot controller (2) through the USB interface, and the mobile robot controller (2) obtains the Kinect XBOX360 camera (3) for pedestrians (4) After the ingested RGB color and depth images are processed, they are sent to the desktop computer (1) through the image transmission chain and data transmission chain.
Embodiment 2
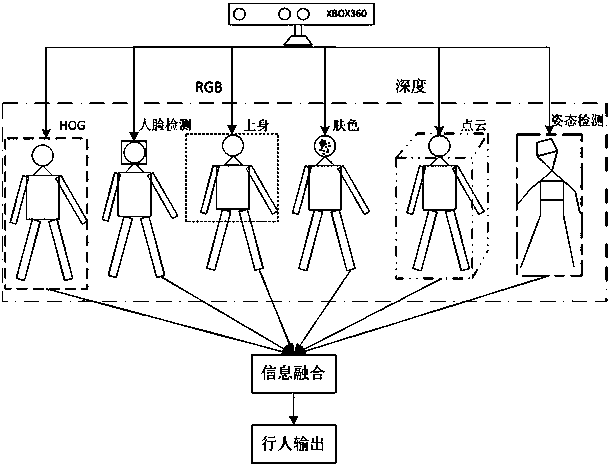
[0028] see figure 1 , this distributed pedestrian detection method based on the mobile robot platform uses the above-mentioned system for detection. To calculate the various characteristics of pedestrians, and integrate the calculated various characteristic data, so as to achieve stable tracking of pedestrian targets during the movement of the robot and improve the accuracy of detection;
[0029] The operation steps are as follows:
[0030] (2.1) Create an image acquisition node: use the distributed computing characteristics of the known robot operating system ROS to create a node that opens the Kinect XBOX360 camera (3) on the embedded operating computer carried by the mobile robot controller (2) to obtain the Kinect image data, and release the RGB image data and depth image data of the Kinect XBOX360 camera (3); using Zeroconf technology, the computer carried by the mobile robot controller (2) is connected to the desktop computer (1) through the network;
[0031] (2.2) Cre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More