

Wearable assistance finger based on myoelectric control and control method thereof
A myoelectric control and wearable technology, applied in passive exercise equipment, physical therapy, etc., can solve the problems of increased hand burden, insufficient compatibility, and difficulty in satisfying power assistance, etc., to achieve load reduction, reliable connection, and good rehabilitation training quality effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] The following is a detailed description of the embodiments of the present invention: this embodiment is implemented on the premise of the technical solution of the present invention, and provides detailed implementation methods and specific operation processes. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention, and these all belong to the protection scope of the present invention.
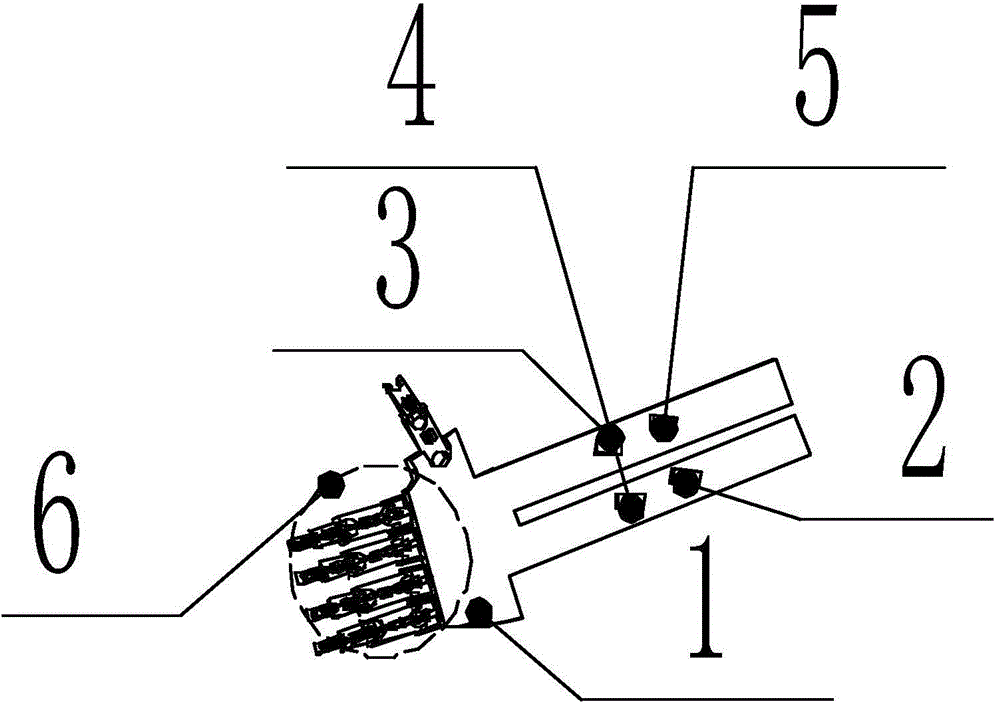
[0065] This embodiment provides a wearable power-assisted finger based on myoelectric control, including an underactuated humanoid finger 6, a magnetic coupling interface, a rehabilitation power-assisted connector 1, a myoelectric acquisition array, a servo motor, and a control system 5; wherein:
[0066] The rehabilitation booster connector 1 includes a booster plate f10 and a palm contact surface f11 integrally connected, the underactuated humanoid finger 6 is set at the free end of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More