

Optimization method of minimum jump trajectory of manipulator based on multi-objective particle swarm optimization
A multi-objective particle swarm and trajectory optimization technology, applied in the direction of instruments, adaptive control, control/regulation systems, etc., can solve problems such as poor performance, wear of joint mechanisms, and global levels that cannot reflect jerk
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
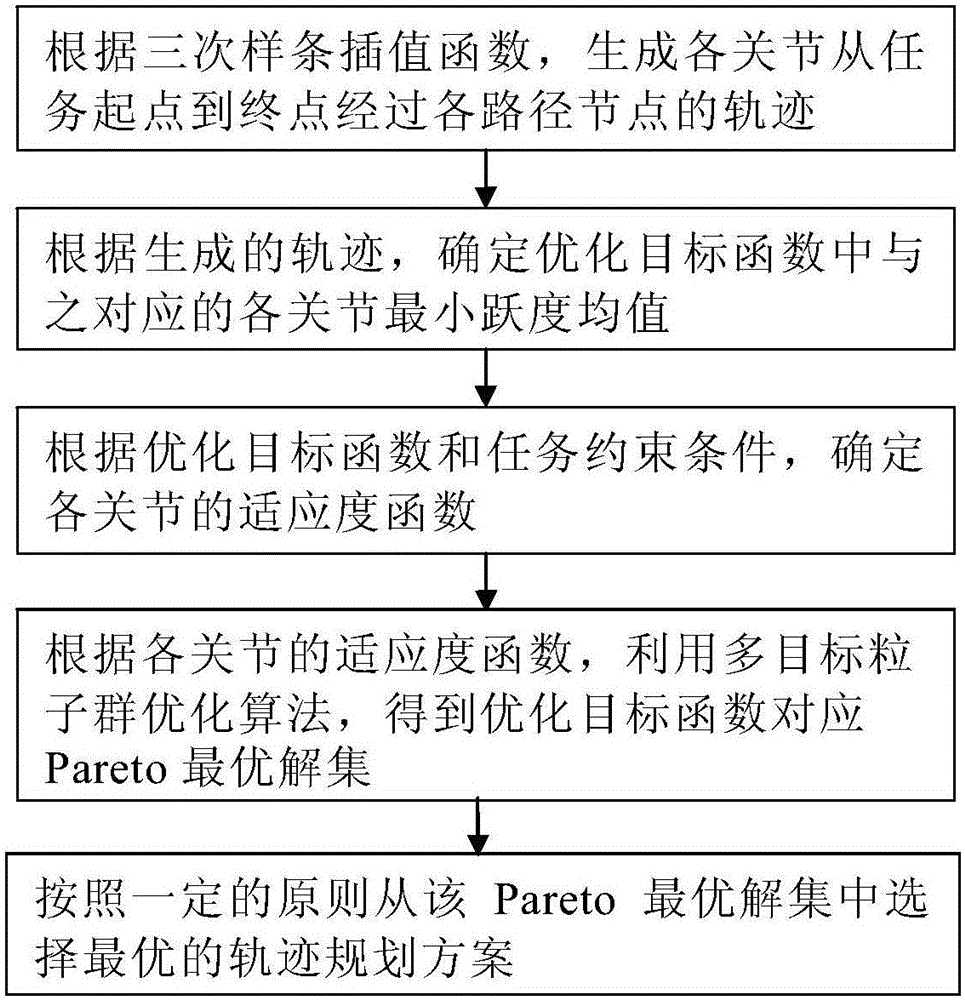
[0044] Studies have shown that reducing the jerk of each joint of the manipulator during the movement process can effectively reduce the execution error of the manipulator and reduce the wear on the joint mechanism during the movement process. The present invention proposes a multi-objective particle swarm algorithm based on The minimum jerk trajectory optimization method of the manipulator is described in detail as follows:
[0045] 1. Trajectory optimization problem with minimum jerk
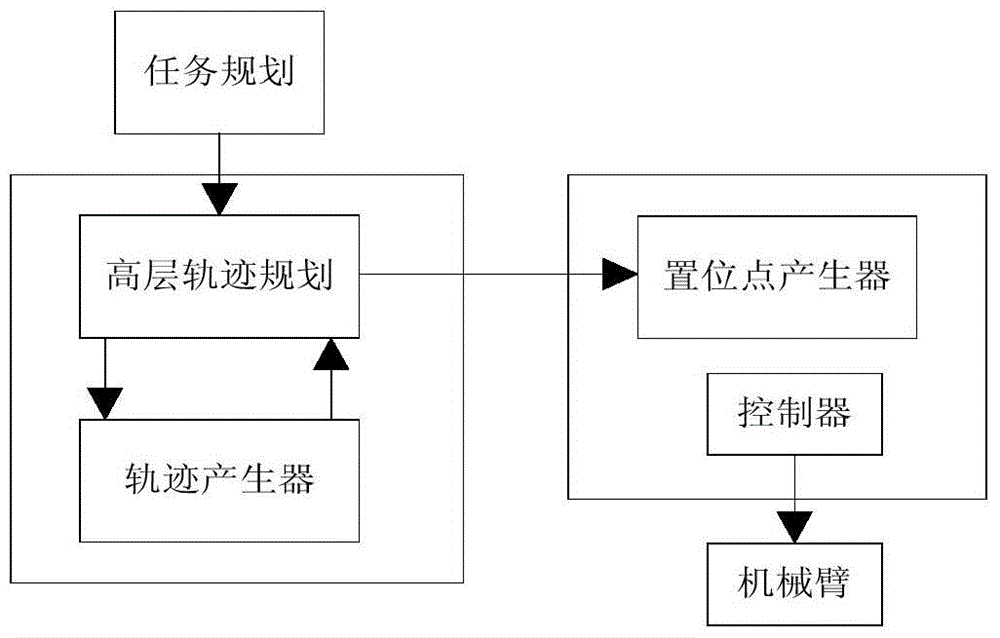
[0046] figure 1 It is the motion planning system of the manipulator. As shown in the figure, before the manipulator performs the task, it needs to use this system to plan the trajectory of the manipulator according to the task requirements. Among them, the upper layer planner is used to generate path nodes according to the task requirements. Each joint must pa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More