

Hydraulic joint of underwater manipulator
An underwater manipulator and hydraulic technology, applied in the direction of manipulators, manufacturing tools, joints, etc., can solve the problems of large size and affect the movement of underwater manipulators, and achieve the effect of small internal leakage and good corrosion resistance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
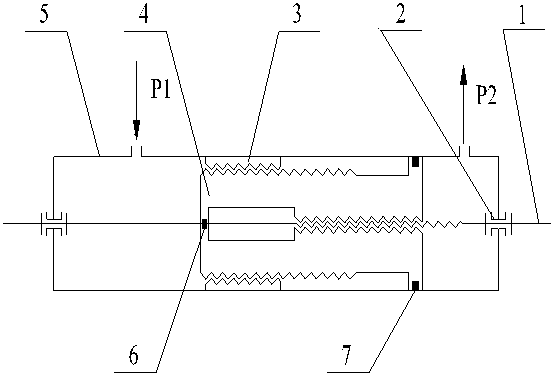
[0018] Embodiment 1: as figure 1 As shown, the device is composed of an output screw 1, a thrust bearing 2, a fixed nut 3, a hollow screw 4, a cylinder 5, a screw sealing ring 6 and a cylinder sealing ring 7. The materials are mostly made of seawater resistant stainless steel. The two ends of the output screw 1 are connected with the cylinder body 5 through the thrust bearing 2 . The fixing nut 3 is assembled with the cylinder body 5 as a whole through thread fastening or interference fit. The hollow screw 4 and the output screw 1 form the first-stage screw pair, and the hollow screw 4 and the fixed nut 3 form the second-stage screw pair. Through the two-stage screw pair, the hydraulic oil pressure at the oil inlet is converted into torque output, and by adjusting the oil pressure difference between the oil inlet and the oil outlet, the forward rotation and reverse rotation of the output screw can be realized, so that Realize large-angle swing motion. Working process of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More