

Leg and wheel hybrid type hydraulic mechanical leg
A hydraulic machinery and hybrid technology, applied in the field of hydraulic mechanical legs, can solve the problems of wheeled robots unable to walk, the walking speed and efficiency are low, and the energy consumption is large, and achieves the effect of simple structure, convenient control, and avoiding direct contact.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
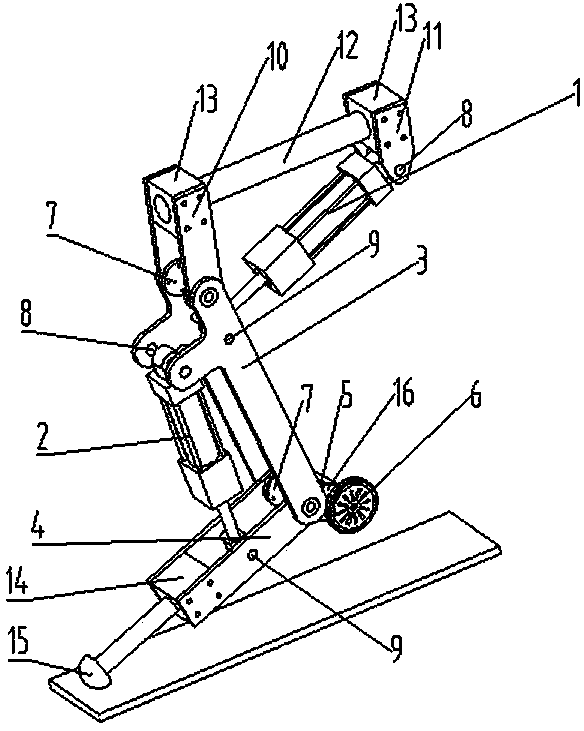
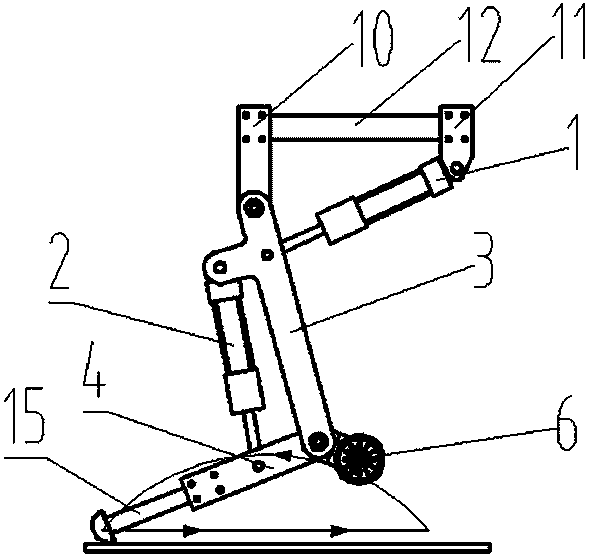
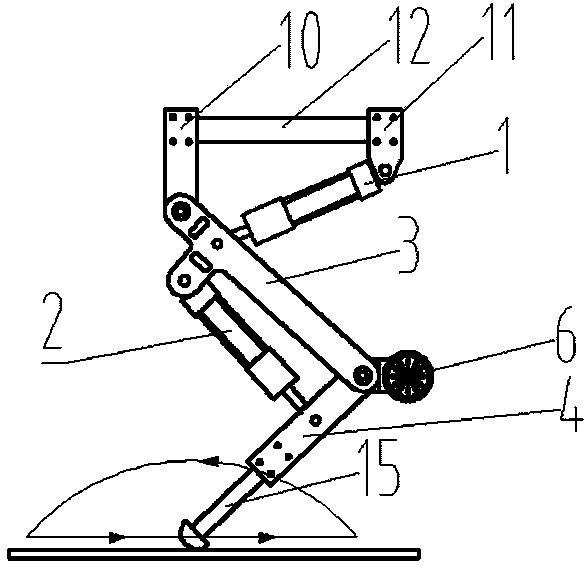
[0028] Such as figure 1 As shown, the present invention includes a thigh hydraulic cylinder 1, a calf hydraulic cylinder 2, and a thigh rod plate 3, a calf rod plate 4, a main body connecting plate 10 and a thigh hydraulic cylinder connecting plate 11 installed relatively in parallel, and between two main body connecting plates 10 tops The main body square fixed block 13 is equipped with by screw, the main body square fixed block 13 is equipped with by screw between two thigh hydraulic cylinder connecting plates 11 tops, the main body square fixed block 13 of the main body connecting plate 10 and the thigh hydraulic cylinder connecting plate 11 The main body cylindrical connecting columns 12 are connected between the main body square fixing blocks 13 .
[0029] Such as figure 1 As shown, the bottoms of the two main body connecting p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More