

Terrain-adaptive transformable mobile robot
A mobile robot and self-adaptive technology, applied in the field of mobile robots, can solve the problems of fragile walking mechanism, low friction resistance, poor reliability and stability, etc. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
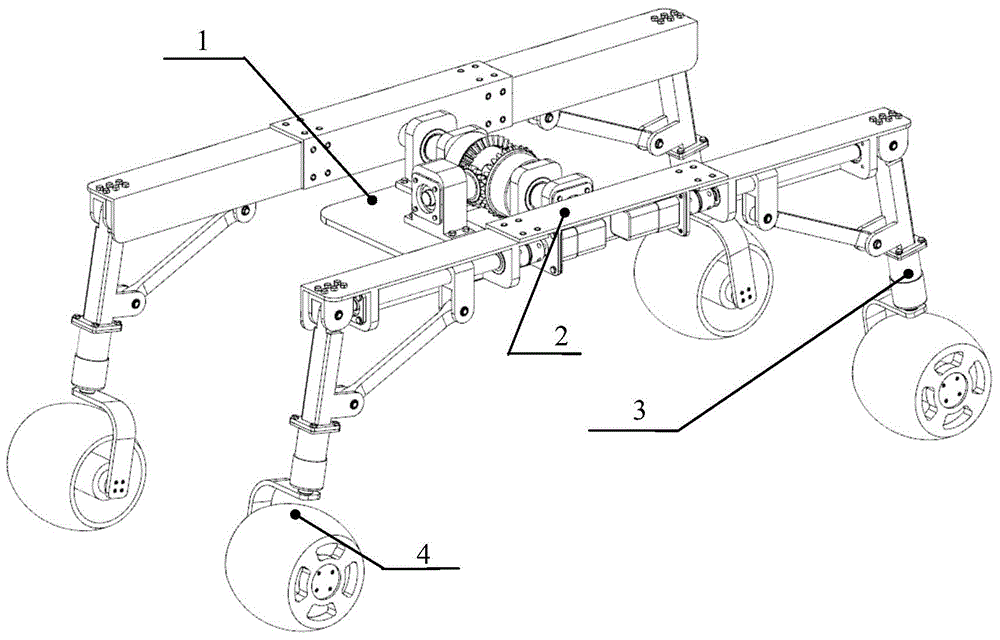
[0022] Such as figure 1 Shown: mobile robot of the present invention is made up of balance mechanism 1, rocker mechanism 2, steering mechanism 3, wheel mechanism 4, and two rocker mechanisms 2 are fixedly installed on both sides of balance mechanism 1, each rocker mechanism 2 A steering mechanism 3 is arranged at both ends, and a rotor mechanism 4 is arranged at the lower end of each steering mechanism 3 .
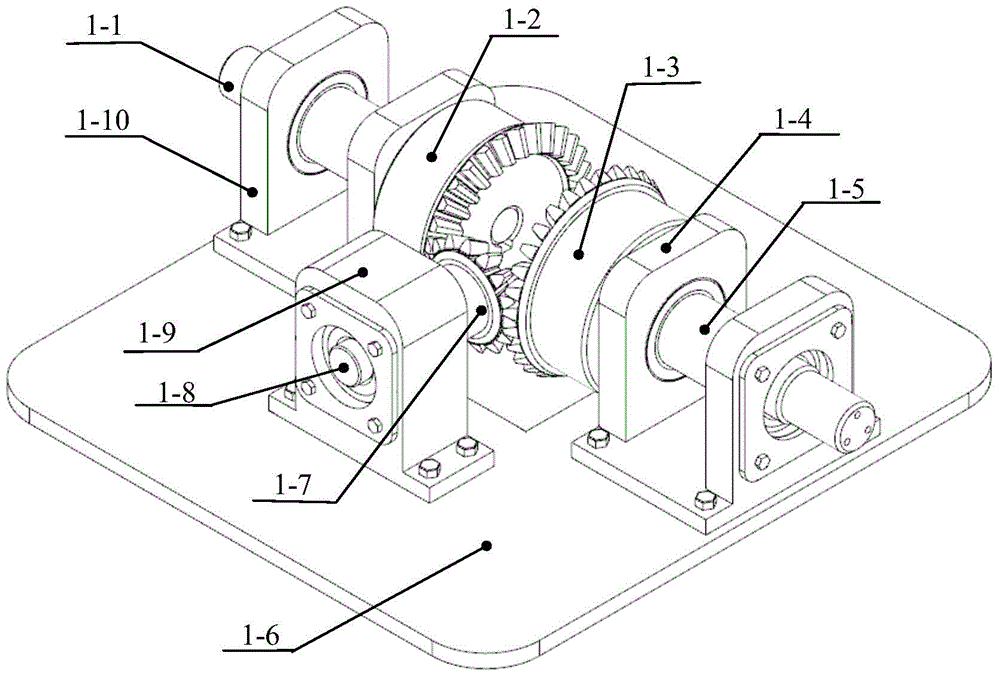
[0023] Such as figure 2 Shown: Balance mechanism 1 includes chassis 1-6, connecting shaft a1-1, connecting shaft b1-5, bevel gear a1-2, bevel gear b1-3, bevel gear c1-7, transmission shaft 1-8, bevel gear a1-2 is installed on the connecting shaft a1-1, the connecting shaft a1-1 is installed on the chassis 1-6 through the mounting seat a1-10, the bevel gear b1-3 is installed on the connecting shaft b1-5, and the connecting shaft...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More