

Dual quaternion mobile communication antenna control method and system based on mems inertial navigation
An antenna control method and antenna control technology, applied to antennas, antenna parts, navigation, etc., can solve the problems of electrical and mechanical impact of antenna servo system, and the demand for rapid communication in motion to satellites, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
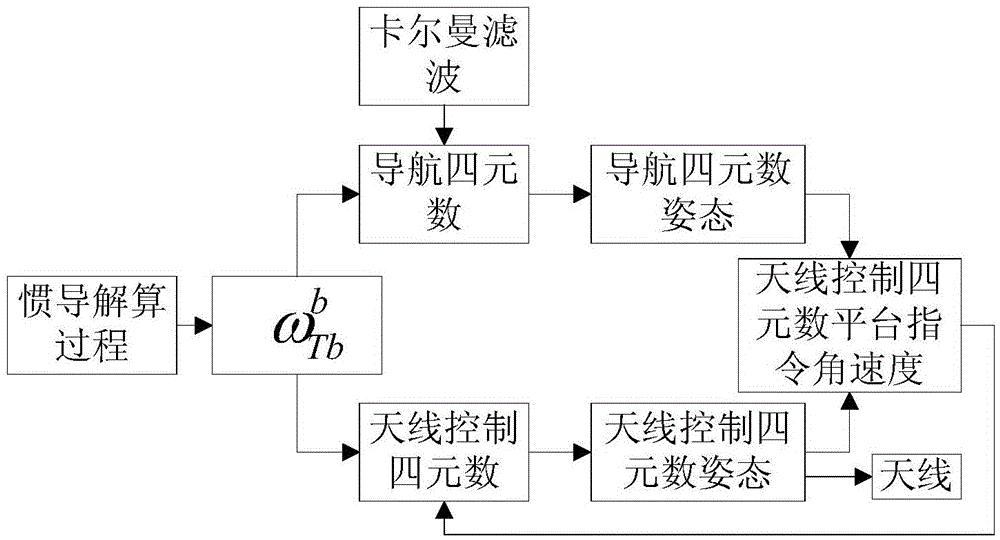
[0043] Such as figure 1 Shown is the schematic diagram of the method of the present invention. The method of the invention adopts the navigation attitude quaternion and the antenna control quaternion to cooperatively control the antenna servo system of the communication in motion on the carrier.
[0044] The concept of antenna control quaternion is introduced into the method of the present invention. The form of the antenna control quaternion is [q' 0 q' 1 q' 2 q' 3 ], the meaning of each parameter is the same as the quaternion [q 0 q 1 q 2 q 3 ] corresponds to the same. At the initial moment of navigation, the antenna control quaternion is equal to the navigation attitude quaternion. The antenna control quaternion needs to be updated twice in each navigation cycle, one is updated by the rotation vector of the carrier system b relative to the ideal platform system T under the carrier system b, and the other is updated by the constant three-axis small command an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More