

System and method for generating driving state and path of transportation vehicle
A driving state and driving path technology, which is applied to road network navigators, collaborative devices, measuring devices, etc., can solve the problems of AGV driving safety impact, expensive driving position detection system, and harsh environment.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
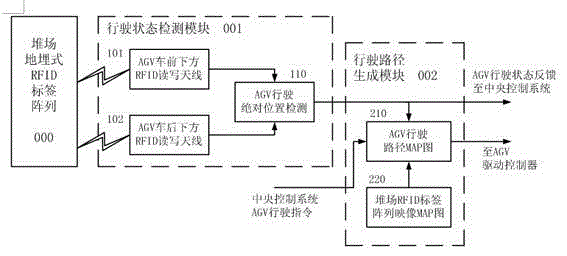
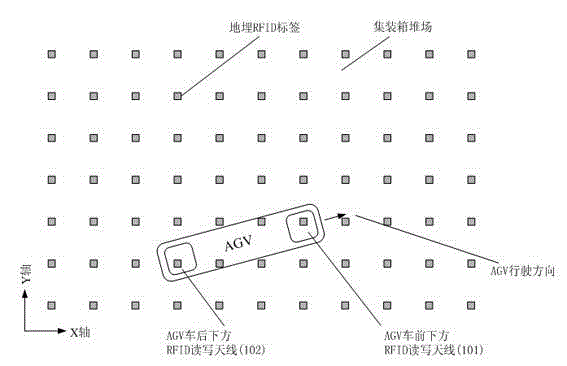
[0055] Such as figure 1 , figure 2 , image 3 As shown, a generation system for the driving state and path of the carrier vehicle is characterized in that it includes an buried RFID tag array 000 arranged in the container yard, a driving state detection module 001, a driving path generation module 002, a central The control system and the AGV drive controller connected with the AGV; the buried RFID tag array 000 is used to generate electromagnetic induction signals to locate the AGV driving on the wharf yard; the driving state detection module 001 communicates with the central The control system and the driving path generation module 002 are electrically connected, receive the electromagnetic induction signal and process the signal to generate a position signal and send it to the driving path generation module 002, and at the same time feed back the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More