

Hand-shaped manipulator
A manipulator and anthropomorphic technology, applied in the field of anthropomorphic manipulators, can solve problems such as inaccuracy, thick knuckle corners, etc., and achieve the effect of flexible and precise operation, small size and light weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] A humanoid manipulator provided by the present invention will be described in detail below in conjunction with the accompanying drawings.
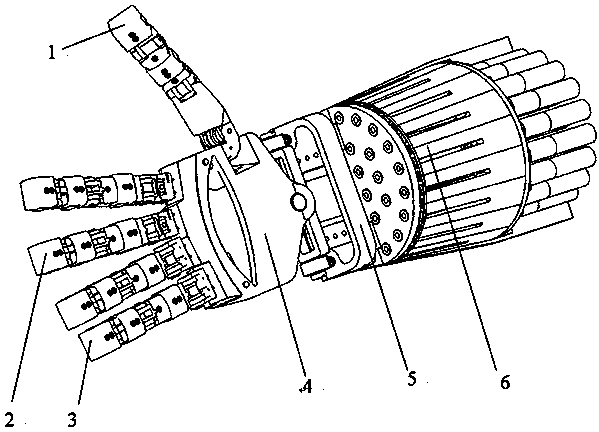
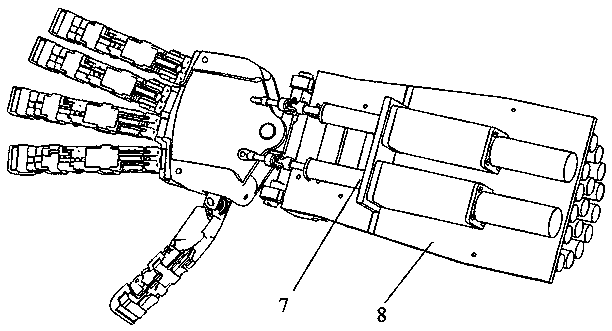
[0025] Such as figure 1 and figure 2 As shown, the anthropomorphic manipulator of the present invention includes a hand, a wrist 5 and a forearm. The hand includes palm 4 and five fingers, and the fingers are divided into three types: A-type finger 2, B-type finger 3 and thumb 1. A-type fingers 2 and thumb 1 realize grasping, and B-type fingers 3 are auxiliary fingers, which can better envelop objects in general grasping work. The general size of the manipulator, including the length of the fingers, the size of the palm 4, and the envelope of the forearm, is determined according to the work requirements.
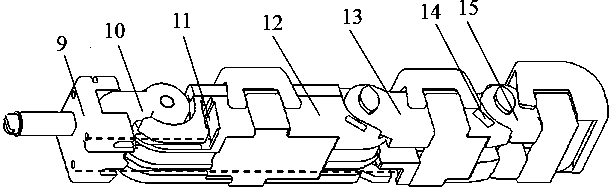
[0026] As shown in Figure 3(a), Figure 3(b) and Figure 3(c), the A-type finger 2 includes A-type distal phalanx 15, A-type middle phalanx 13, A-type proximal phalanx 12, A-type base phalanx 10 and A-type base 9, the two ends ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More