

Laser-positioning automatic robot
A laser positioning and robotic technology, applied in manipulators, manufacturing tools, etc., can solve the problems of complex mirror vibration frequency and short service life
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
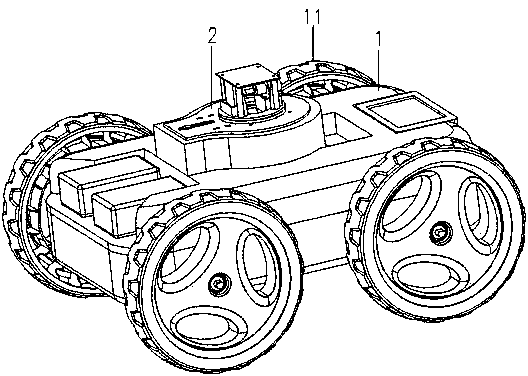
[0023] refer to figure 2 The shown robot includes a body 1 , a laser scanning mechanism 2 , and traveling wheels 11 . The body 1 is used to carry the laser scanning mechanism 2 . The laser scanning mechanism 2 is installed at a higher position of the body 1 to prevent other parts on the body from blocking the scanning laser, and the scanning laser formed by the scanning mechanism 2 continuously rotating 360° when the robot walks.
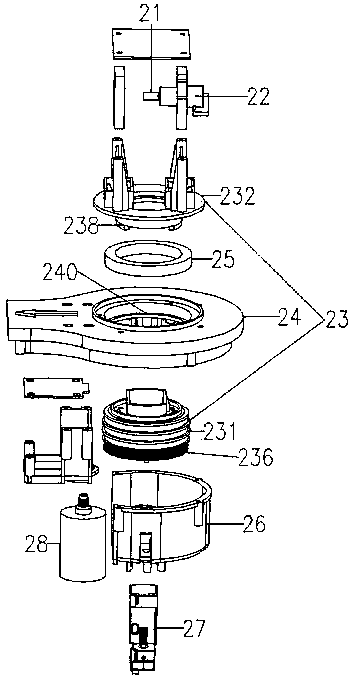
[0024] refer to image 3 The laser scanning mechanism 2 shown includes: a reflector 21, a first power motor 22, a rotating part 23, a stationary part 24, a rotating bearing 25, a bracket 26, a laser transceiver 27 integrating a transmitting part and a receiving part, and a second power motor 28. The reflective mirror 21 is thin sheet-shaped and its thickness is less than 1 millimeter. The reflective mirror 21 is arranged on the shaft of the first power motor 22, and the rotating bearing 25 is sleeved outside the rotating part 23, and the rotatin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More