

Inertial navigation error correction method based on geomagnetism modulus gradient and particle filter
A modulus gradient and error correction technology, which is applied in the field of underwater geomagnetic-assisted navigation and positioning, can solve problems such as inability to adapt to large initial errors, and achieve the effect of reducing boundary effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] Embodiments of the present invention are described in detail below in conjunction with accompanying drawings:
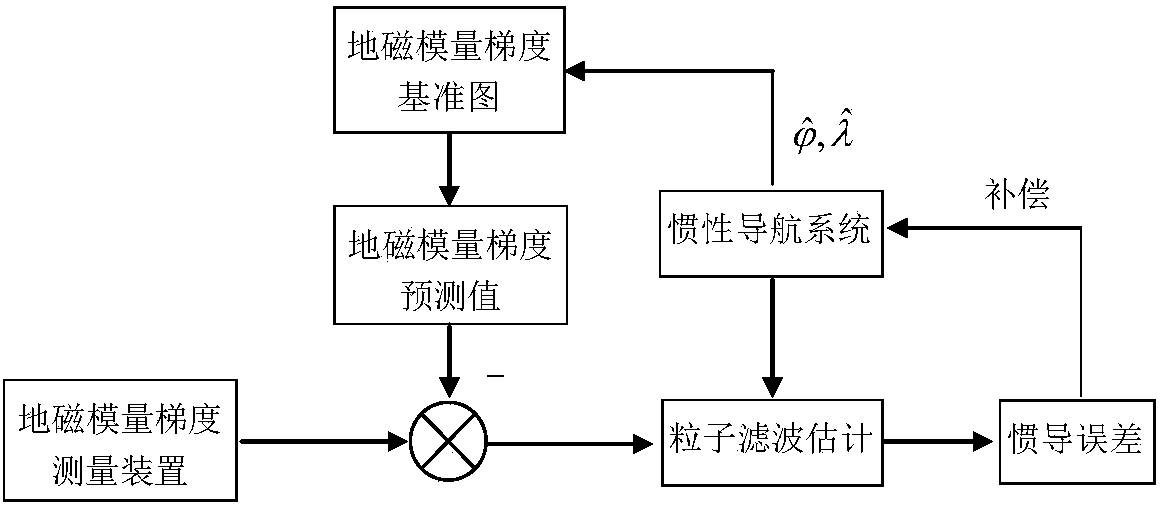
[0032] An inertial navigation error correction method based on geomagnetic modulus gradient and particle filter of the present invention uses geomagnetic anomaly data to construct an underwater geomagnetic modulus gradient reference map in advance and stores it in an integrated navigation computer. The geomagnetic modulus gradient measurement device obtains the measured value of the geomagnetic modulus gradient at the location of the carrier in real time, and the inertial navigation system calculates the location of the carrier, and finds the predicted value of the geomagnetic modulus gradient on the geomagnetic modulus gradient reference map according to the calculated position. The difference between the measured value and the predicted value of the geomagnetic modulus gradient is used as the observation information. The particle filter technology is used to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More