Force Control Module Based on Variable Stiffness Flexible Mechanism
A flexible mechanism and control module technology, which is applied to the parts of grinding machine tools, grinding automatic control devices, manufacturing tools, etc., can solve the problems of workpiece or robot system damage, slow stiffness change speed, and bulky mechanism, etc. The effect of mass production, small dead stroke, and easy miniaturization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
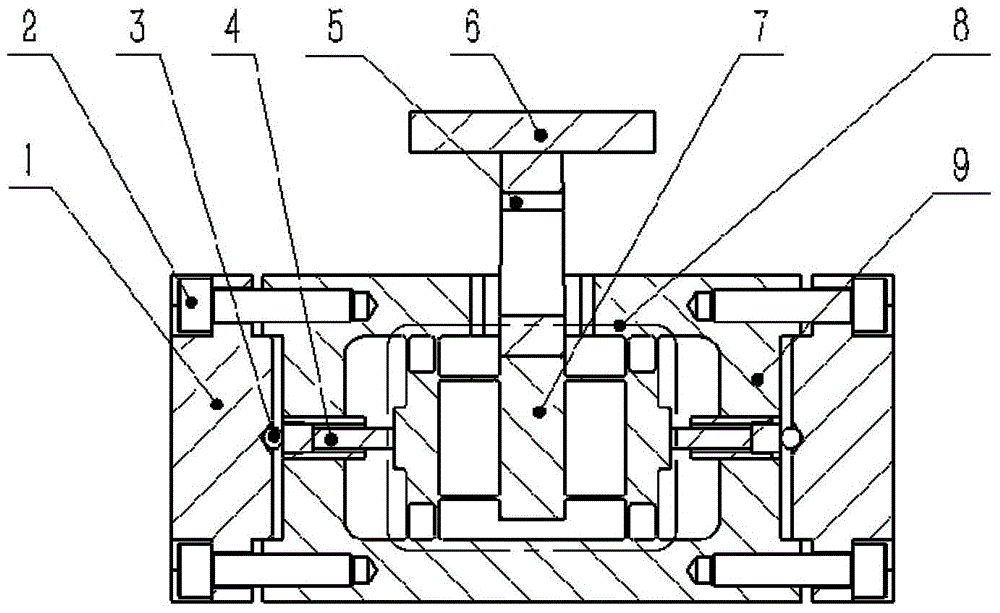
[0024] Example: such as figure 1 As shown, the present invention includes a housing 9, a cover plate 1 placed at both ends of the housing 9, a flexible mechanism 8, a piezoelectric driver 4, a pre-tightened steel ball 3 and a sensor 5, and the flexible mechanism 8 is placed in the housing 9 Between the two cover plates 1, piezoelectric actuators 4 are respectively arranged between the two ends of the flexible mechanism 8 and the cover plate 1, a pre-tightening steel ball 3 is arranged between the cover plate 1 and the piezoelectric actuator 4, and the sensor 5 is placed in a flexible The output terminal of mechanism 8.
[0025] The flexible mechanism 8 includes at least two rows and two rows of criss-cross leaf-shaped shrapnel and an output shaft 7, on which a sensor 5 is arranged; the output shaft 7 is connected between the criss-crossed leaf-shaped shrapnel , the ends of the two transverse leaf-shaped shrapnel are respectively in contact with the piezoelectric driver 4 . T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More