

Adaptive unscented Kalman filter-based deepwater robot short-baseline combined navigation method
A colorless Kalman, ultra-short baseline technology, applied in navigation, surveying and navigation, navigation computing tools, etc., can solve the problems of acoustic positioning data with many outliers, complex and changeable motion states, delays, etc. The effect of delay, small amount of computation, and high estimation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
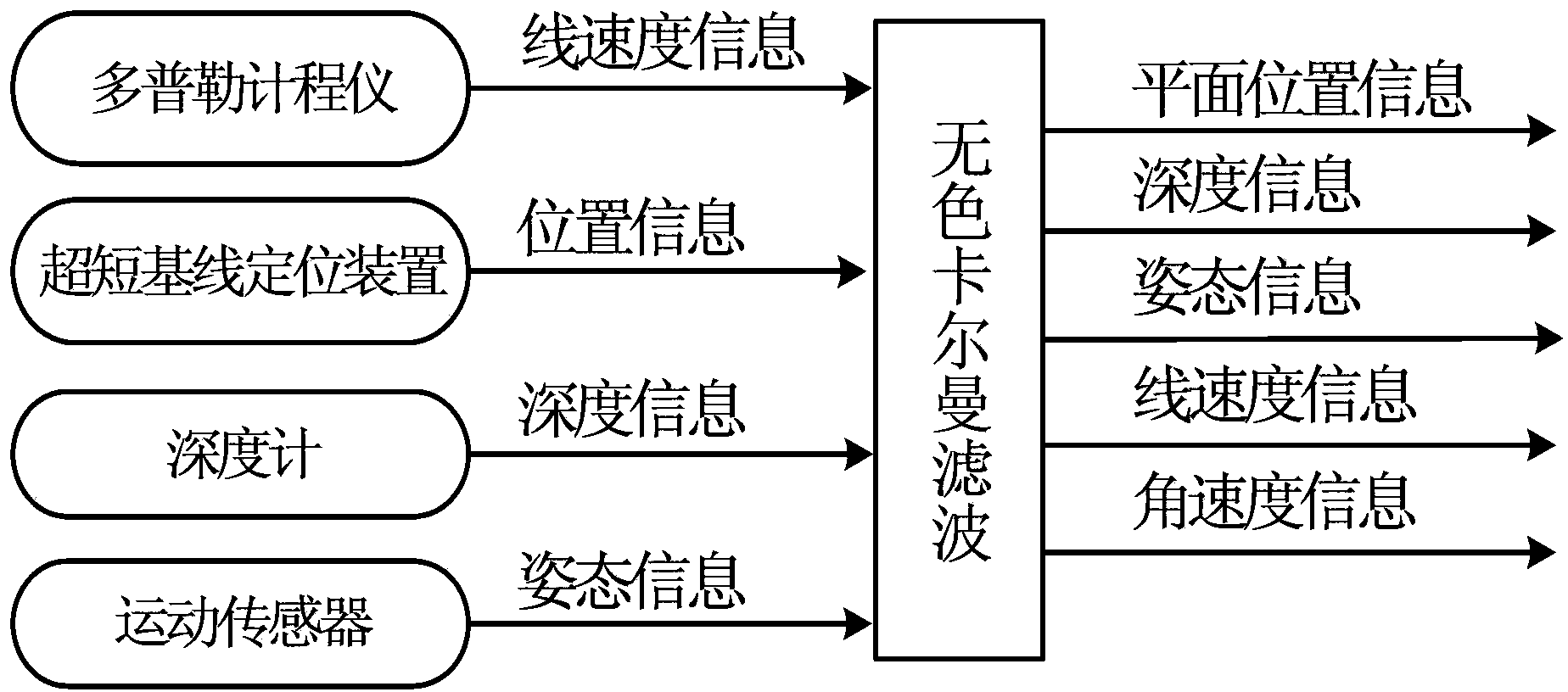
[0039] like figure 1 Shown is the working principle diagram of the integrated navigation method of the present invention: utilize Doppler log to collect linear velocity information, utilize ultra-short baseline acoustic positioning device to collect plane position information, utilize depth meter to collect depth information, utilize motion sensor to collect attitude Information, use the data fusion method to fuse the above information to obtain the three-dimensional motion trajectory of the deep-sea robot in the sea, and at the same time, it can smooth the heading required by the deep-sea robot control system and the speed information in the carrier coordinate system.
[0040] (1) Take the velocity vector in the vehicle coordinate system, the position vector and the heading angle in the earth coordinate system as the filter state vector, defi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More