

Branch analysis method of kinematics of robot with n degrees of freedom driven by n+1 wires
A technology of robot kinematics and analysis method, applied in the field of branch analysis of kinematics of N+1 wire-driven robots with N degrees of freedom, can solve the problems of cumbersome process and error-prone, and achieve the effect of simplifying the modeling process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0021] The branch analysis method of the present invention will be described in detail below in conjunction with specific embodiments.
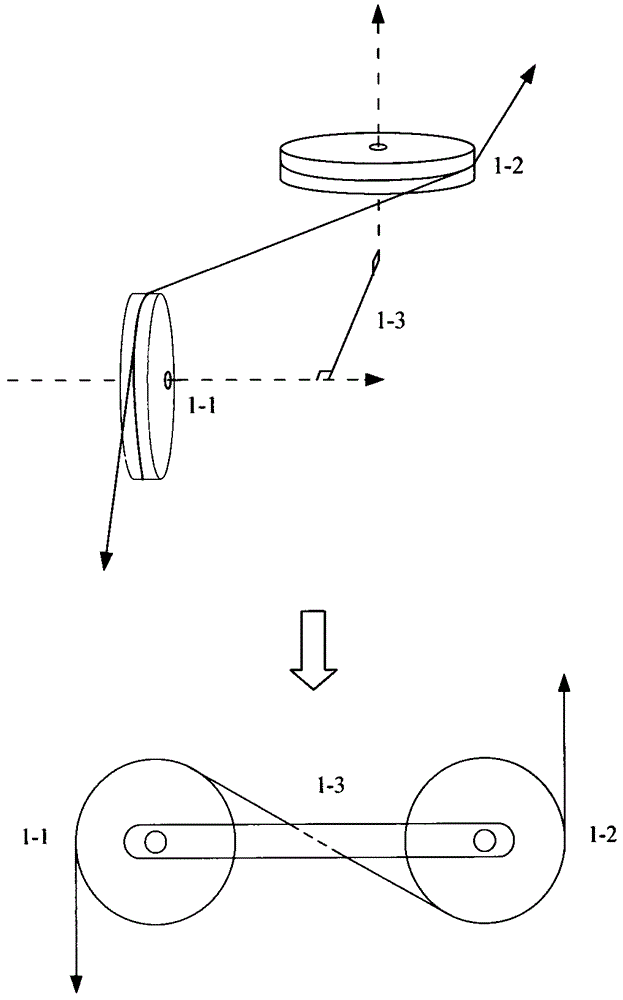
[0022] In order to simplify the analysis, N + 1 wires drive the robot with N degrees of freedom to follow the following assumptions: (1) All wires are always in tension, and the elongation of wires caused by tension is ignored; the distance between wires and wheels is The friction force is large enough so that there is no relative slip motion between the wire and the wheel; the wire is light in weight, and the inertia, bending and shear effects of the wire are negligible; (2) the mechanism follows the general degree of freedom equation, and the mechanism is a joint type , and after removing the wire and the wheel, the mechanism becomes an open-loop chain robot. Each wheel has a revolving joint on its axis, and in order to obtain a constant center distance between the two wheels, each pair of wheels connected by wire has a common support body....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More