

Method for constructing motion space for robot under inherent constraints
A technology of robot motion and inherent constraints, which is applied to manipulators, program-controlled manipulators, manufacturing tools, etc. It can solve the problems of low robot positioning accuracy, inaccurate and incomplete construction of robot motion space, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
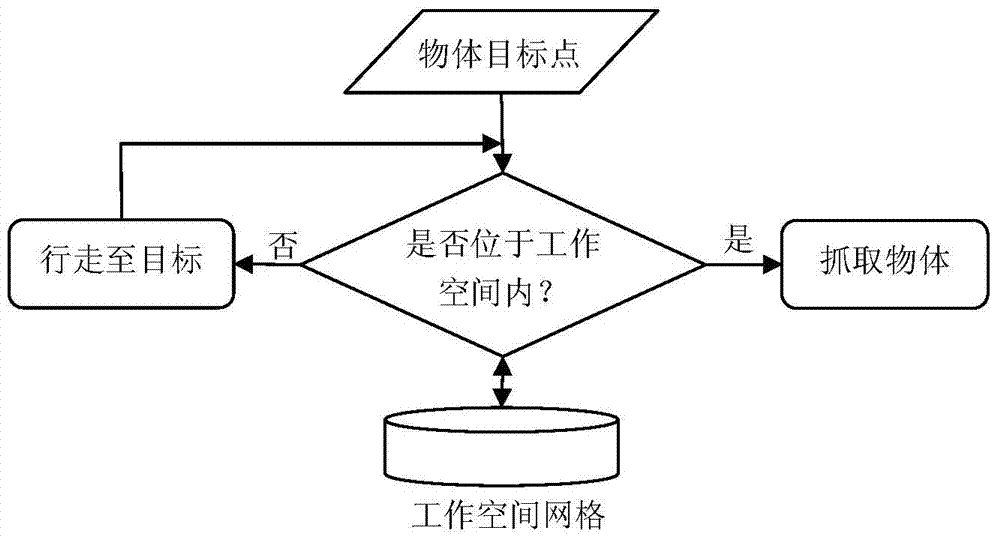
[0031] like figure 2 shown, for figure 1 In the workspace grid, solve and describe the workspace that only uses the arm joint space, and the detailed process of solving the workspace by Monte Carlo method, that is, the method of constructing the robot motion space under the inherent constraints, the method includes the following steps:
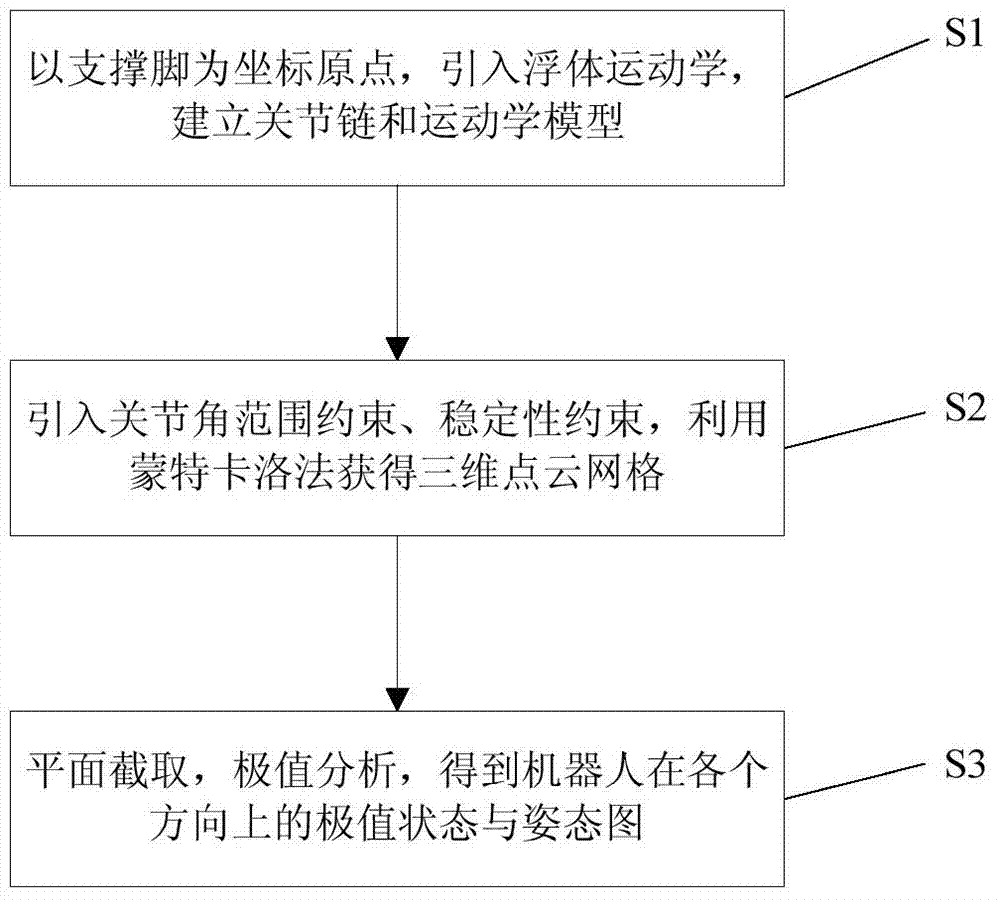
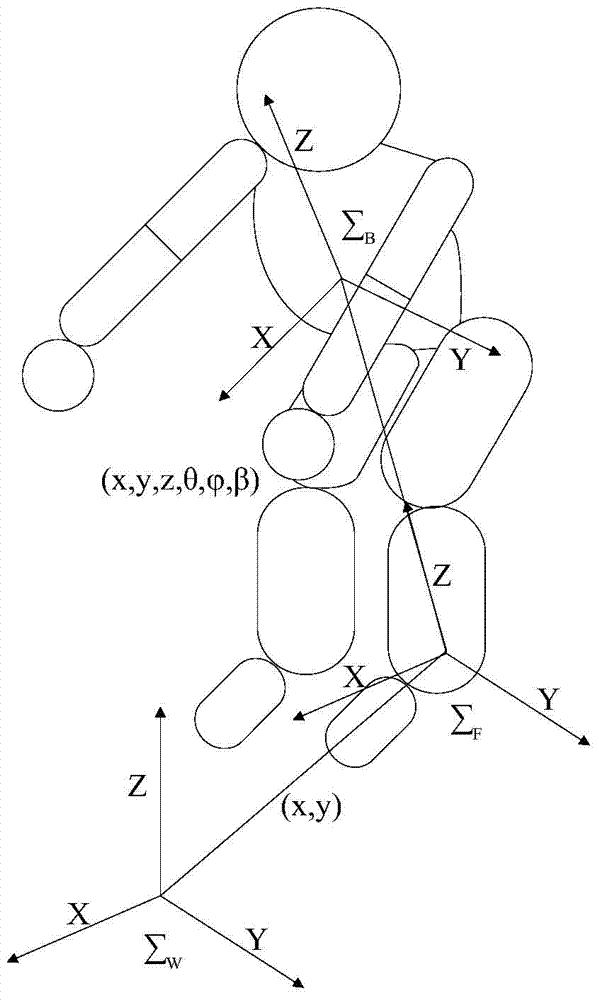
[0032] Step S1: Taking the supporting foot as the origin of coordinates, introduce the kinematics of the floating body to the base coordinate system of the robot body, such as X E =f(θ F , θ E ), establish a joint chain and kinematics model based on the joints of the whole body, the end effector of the robot is not only related to the joint from the end to the center of mass, but also affected by the joint from the center of mass to the supporting foot, such as image 3 , 4 shown.
[0033] Step S2: Based on the joint chain and kinematics model, introduce joint angle constraints and stability constraints, and use the Monte Carlo method to...
Embodiment 2
[0042] The robot workspace under complex whole-body motion is solved. The representative Monte Carlo method in the numerical method is used to solve the point set in the workspace, and various inherent constraints such as the joint range constraints of each joint of the robot under the whole body motion will be introduced to discuss the complexity of satisfying these constraints. The scope of the workspace for the situation. The implementation steps are the same as those in Embodiment 1, and the solution object is the working space range of each joint of the robot under the inherent constraints.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More