Precise landing automatic control method for traffic information collecting unmanned aerial vehicle
A technology of traffic information collection and unmanned aerial vehicles, which is applied in the field of transportation, can solve the problems of difficult to achieve precise landing and fixed-point landing of unmanned aerial vehicles, and achieve the effect of fast information interaction, low cost and strong robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described below in conjunction with the accompanying drawings and specific examples.
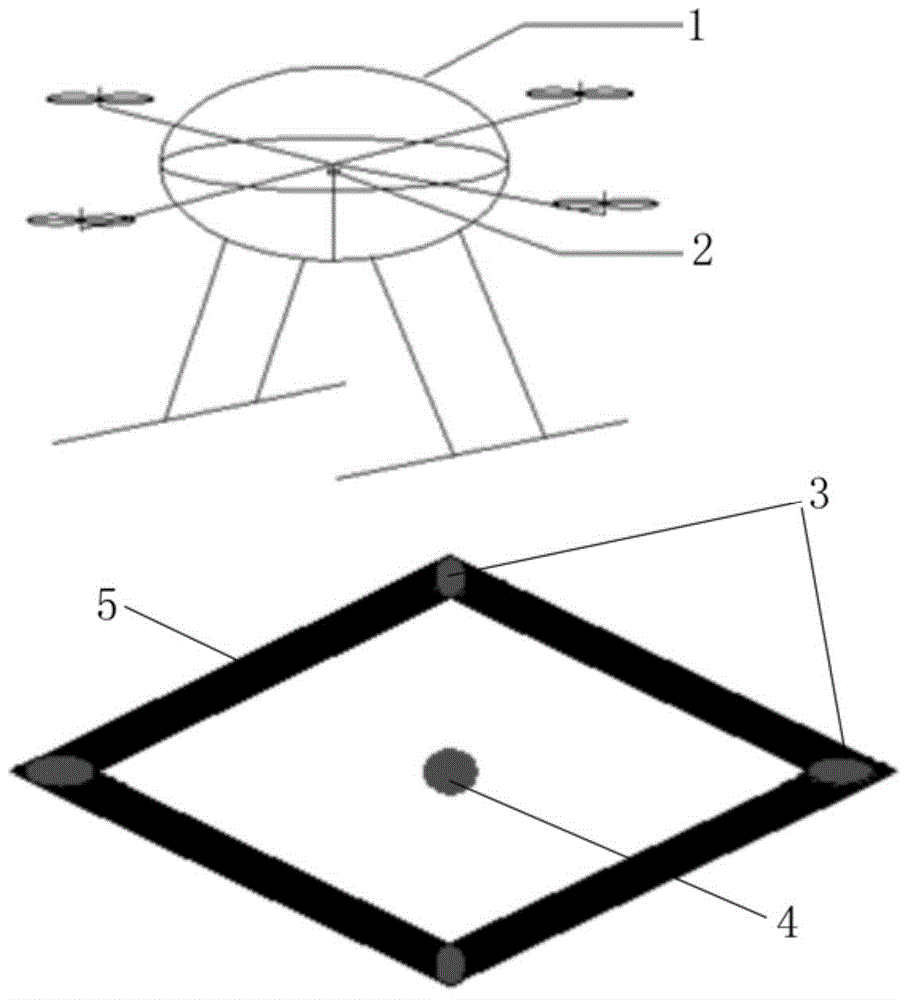
[0024] Such as figure 1 As shown, a kind of precise landing automatic control method for the traffic information collection unmanned aerial vehicle provided by the present invention comprises the following steps:
[0025] S1. First-level positioning: UAV 1 flies to the first-level target position according to GPS, including longitude, latitude and height information. The selection principle of the first-level target position is: the local area wireless network of the ground control station can cover.
[0026] S2. The UAV 1 establishes a local area wireless network connection with the ground control station.
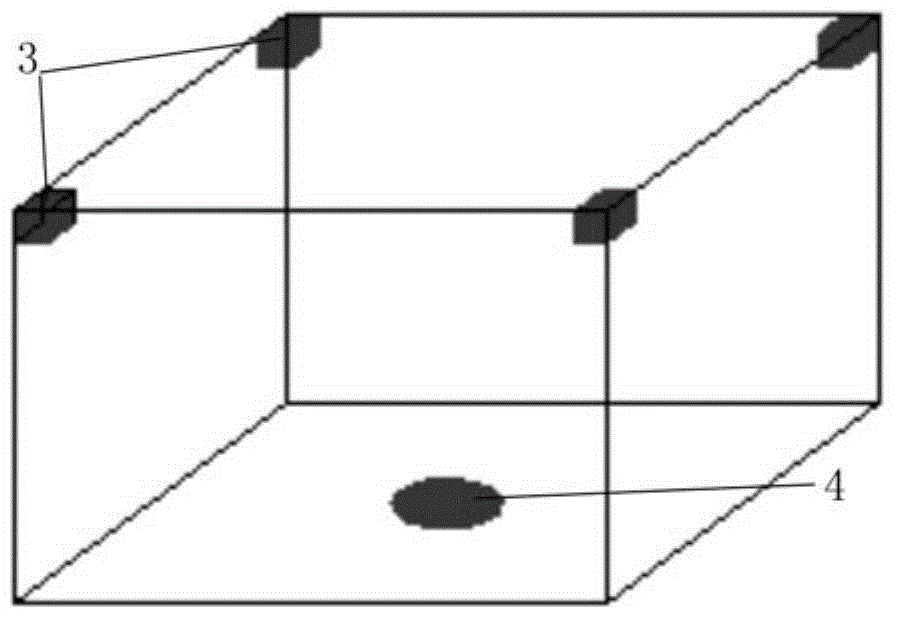
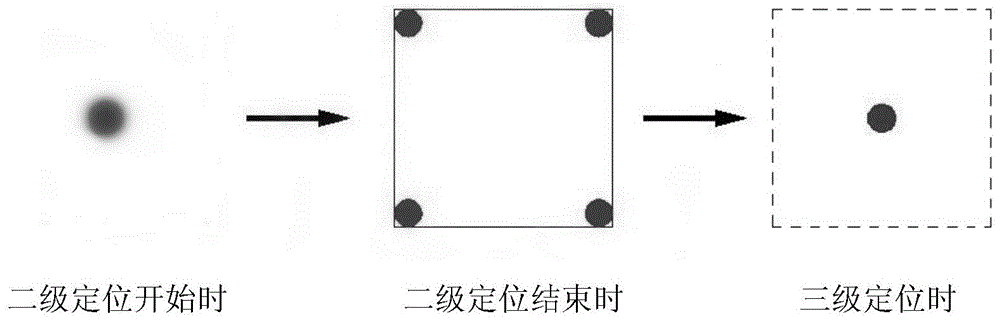
[0027] S3. Secondary positioning: UAV 1 sends a secondary positioning request to the ground control station, and at the same time starts video positioning (acquires the light source image through the camera 2 on the drone 1); the ground cont...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More