

Method for realizing indoor positioning based on multi-information fusion
A multi-information fusion and indoor positioning technology, which is applied in the field of indoor positioning based on multi-information fusion, can solve problems such as low precision, structural interference, and difficult positioning, and achieve the effects of improving versatility, reducing interference, and wide application range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] In order to describe the technical content of the present invention more clearly, further description will be given below in conjunction with specific embodiments.
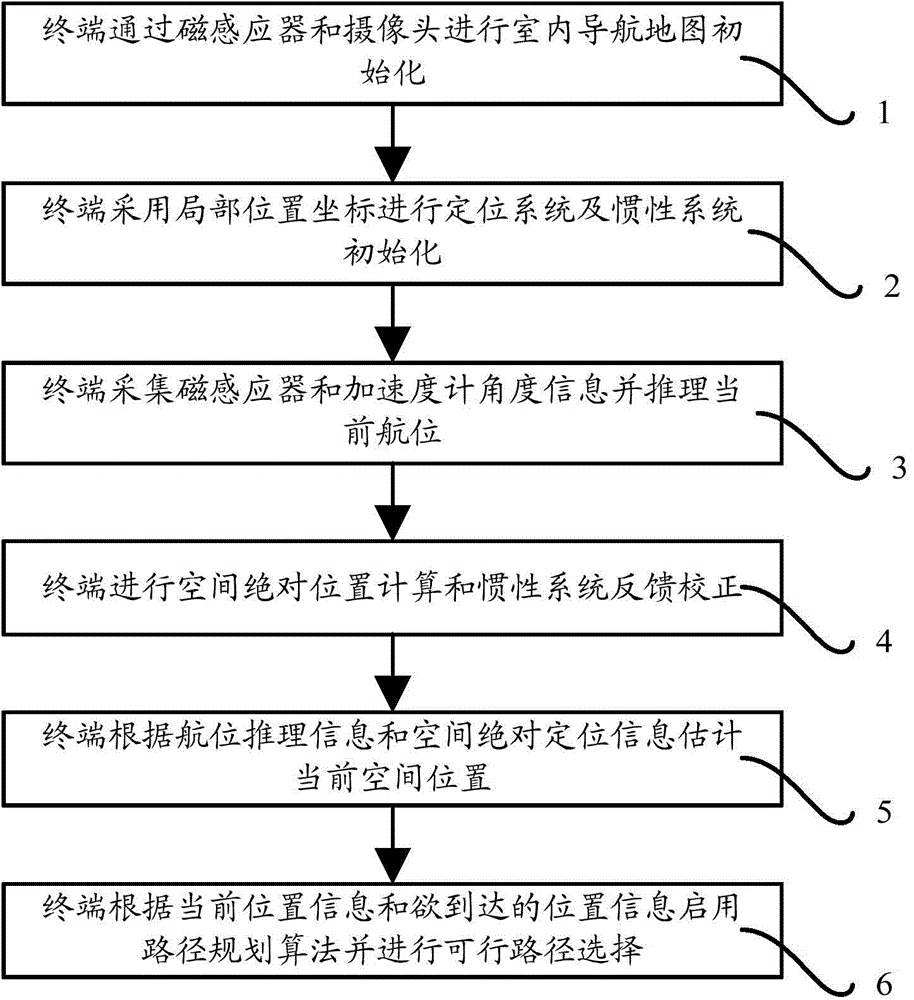
[0038] The method for realizing indoor positioning based on multi-information fusion is mainly characterized in that the method includes the following steps:
[0039] (1) The terminal initializes the indoor navigation map through the magnetic sensor and the camera;
[0040] (2) The terminal uses the local position coordinates to initialize the positioning system and the inertial system;
[0041] (3) The terminal collects magnetic sensor and accelerometer angle information and deduces the current navigation position;
[0042] (4) The terminal performs space absolute position calculation and inertial system feedback correction;
[0043] (5) The terminal estimates the current spatial position according to dead position inference information and spatial absolute positioning information;
[0044] (6) The term...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More