

Image fast Fourier transformation (FFT) symbol information based unmanned aerial vehicle autonomous landing target detection method
A technology of autonomous landing and target detection, applied in the field of drones, can solve problems such as loss and limited range of DCT, and achieve high accuracy, easy implementation, and simple principles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
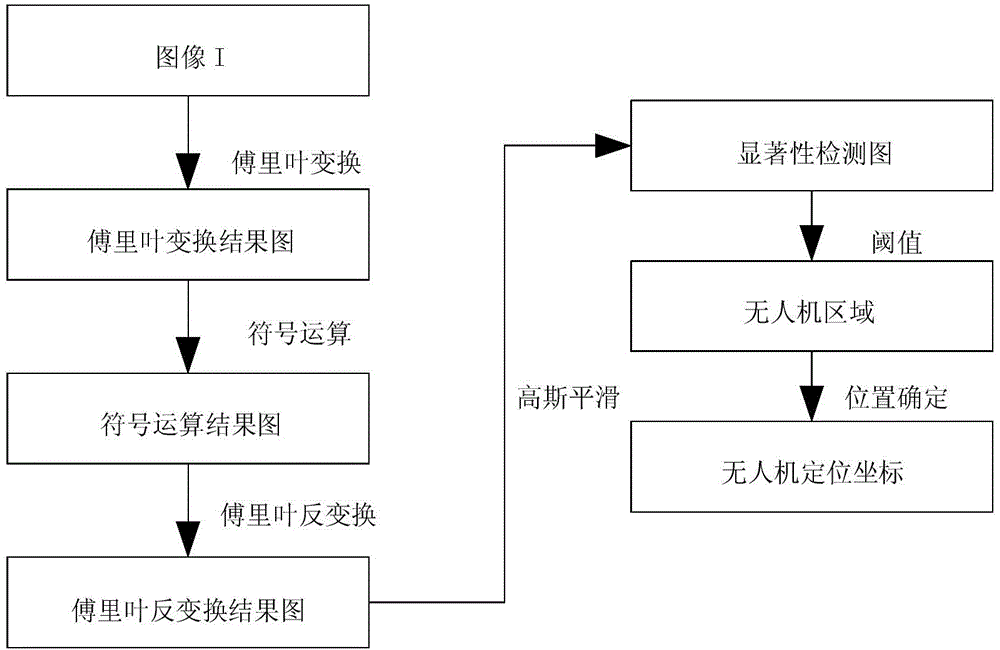
[0027] like figure 1 Shown, the UAV autonomous landing target detection method based on image FFT symbol information of the present invention, its steps are:
[0028] (1), image I will be obtained num Convert from RGB color space to LAB color space;
[0029] Since the LAB color space is more consistent with the selection mechanism of human visual attention, the image is generally converted from the RGB of the computer to LAB first.
[0030] (2), carry out FFT transformation to each channel of LAB respectively, obtain corresponding amplitude spectrum and phase spectrum; That is: to obtain image I num The three channels of the LAB are respectively Fourier transformed to obtain the FFT processing result I of each channel num_i ,i=1,2,3.
[0031] The definition of FFT transform is:
[0032] F ( ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More