

Underwater magnetic field and six-axis inertia combined positioning system
A joint positioning, six-axis technology, applied in measurement devices, instruments, mapping and navigation, etc., can solve the problems of large drift, high cost, low accuracy, etc., to filter out interference, ensure stability and accuracy, and reduce system costs. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0011] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
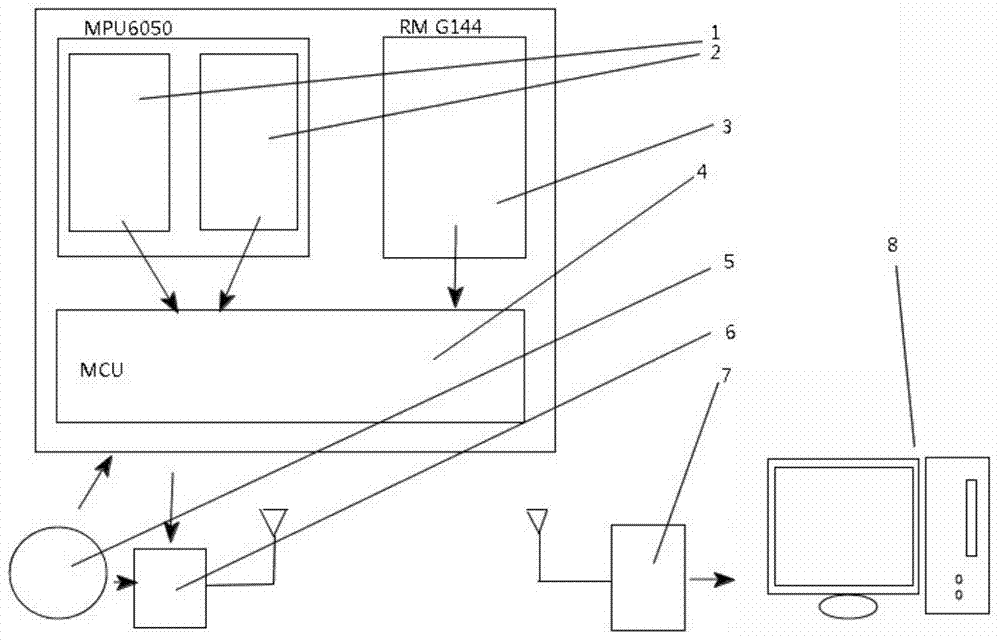
[0012] Such as figure 1 As shown, 1 and 2 are the sensing chip MPU6050 composed of a three-axis acceleration sensor and a three-axis gyroscope respectively, and 3 is a three-axis magnetometer RM G144. These two sensing chips will sense the The acceleration, acceleration and magnetic field strength of each axis of the sensor are sent to the main processor 4.
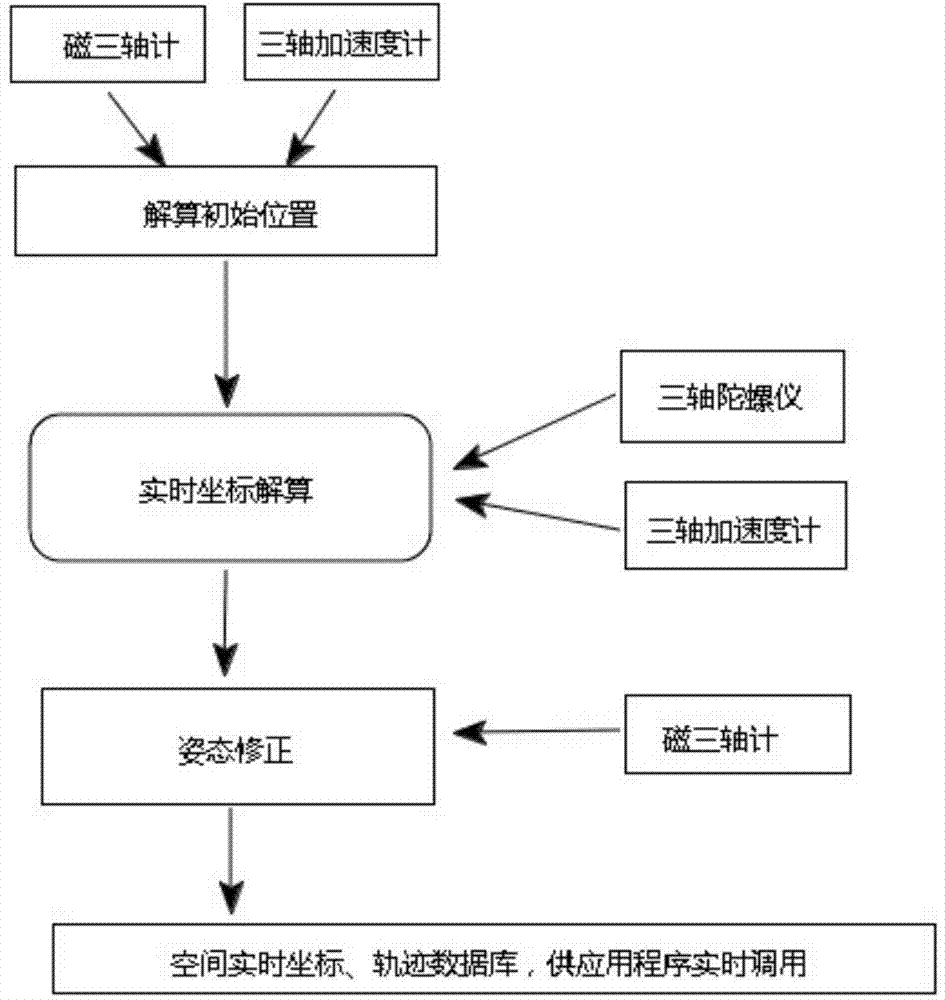
[0013] Such as figure 2 Shown are the steps required for the computer system 8 to perform underwater space calculations. First determine the absolute underwater space coordinate system. First, after starting up, 8 determines the acceleration value of each axis when the angular velocity is 0 in the initial state, and determines the acceleration force value and direction of the three axes. Determine the magnetic field strength values of the three axes at this time, and calculate their ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More