Redundant drive planar two-degree-of-freedom parallel manipulator with parallelogram branches
A parallelogram, plane two technology, applied in the field of redundant drive plane two degrees of freedom parallel manipulator, can solve the problem of easy out of control mechanism, poor stiffness, etc., to expand the scope of application and field, simple structure, reduce the effect of motion inertia
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0011] The specific implementation manners of the present invention will be described in detail below in conjunction with the accompanying drawings.
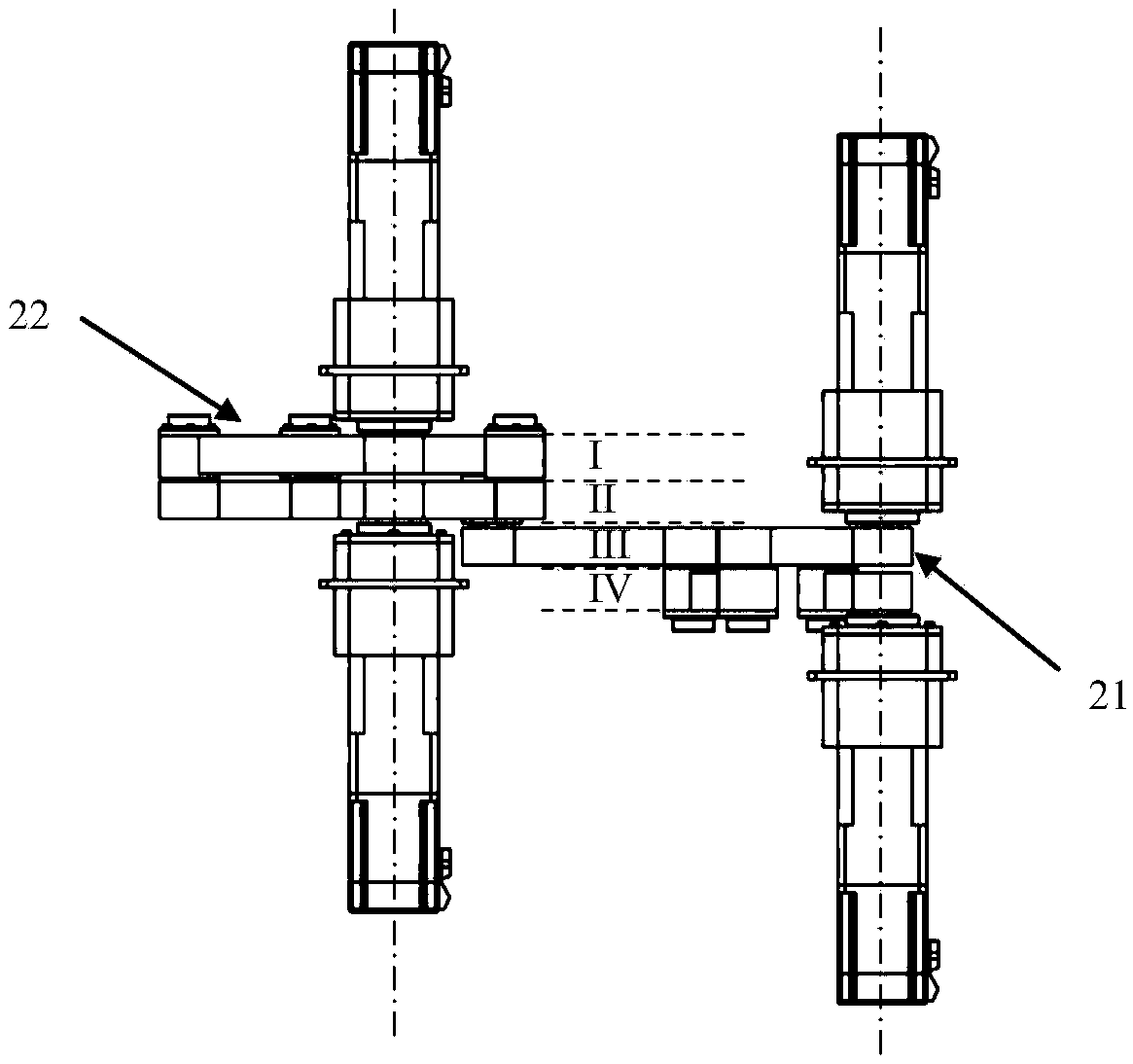
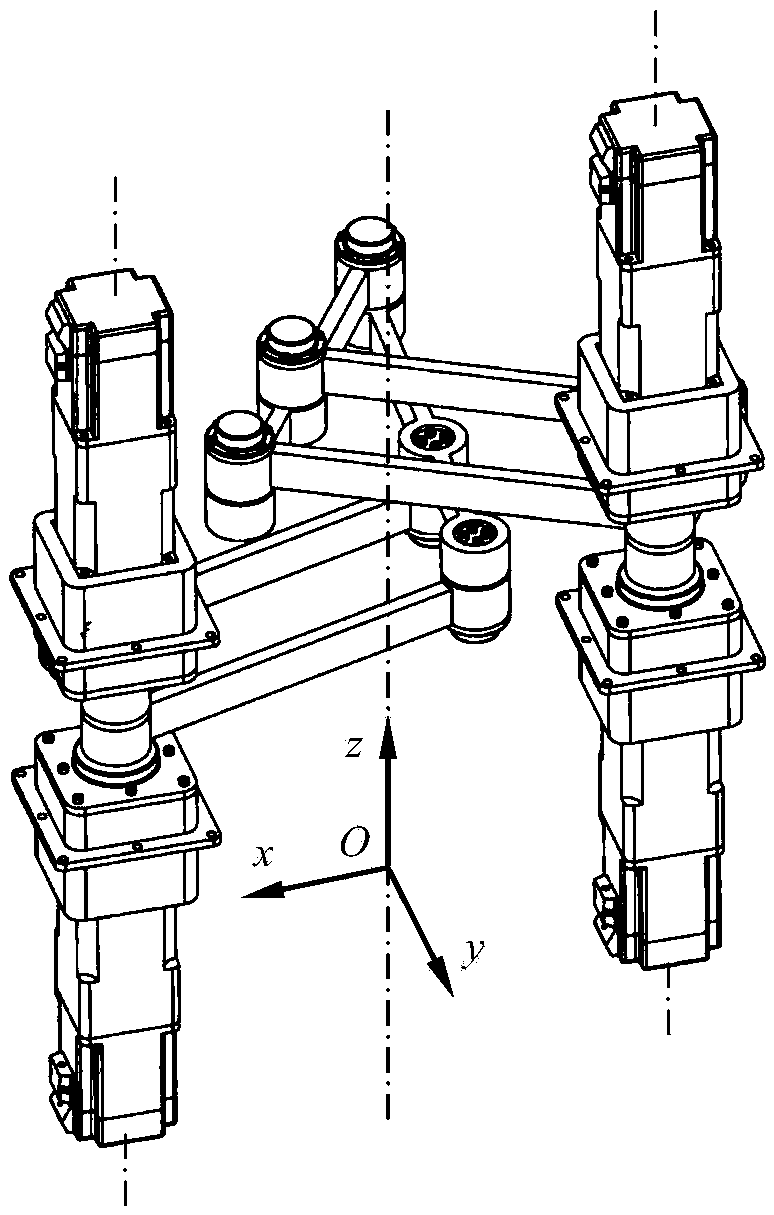
[0012] As shown in the accompanying drawings, the redundant drive planar two-degree-of-freedom parallel manipulator of the present invention containing parallelogram branch chains includes two parallelogram kinematic chains and four servo motors arranged on both sides of the Z axis. Two servo motors 1, 10, 11, and 20 are placed on both sides, and the two servo motors on each side are arranged up and down and the central axis is collinear. The output shaft of each servo motor is fixed to the input end of a reducer The two reducers on the same side are arranged as an upper reducer and a lower reducer that are set up and down oppositely. The two parallelogram kinematic chains are composed of a main branch chain and an auxiliary branch chain. The two main bodies The branch chains all include an active long rod 5 (14), one end of eac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com