A six-legged spider search and rescue robot in a coal mine
A technology for robots and coal mines, applied in the field of search and rescue robots, can solve the problems of poor road conditions, insurmountable, inability to overcome obstacles, etc., and achieve the effect of improving flexibility, increasing load capacity, and improving obstacle-crossing and obstacle-avoiding functions.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
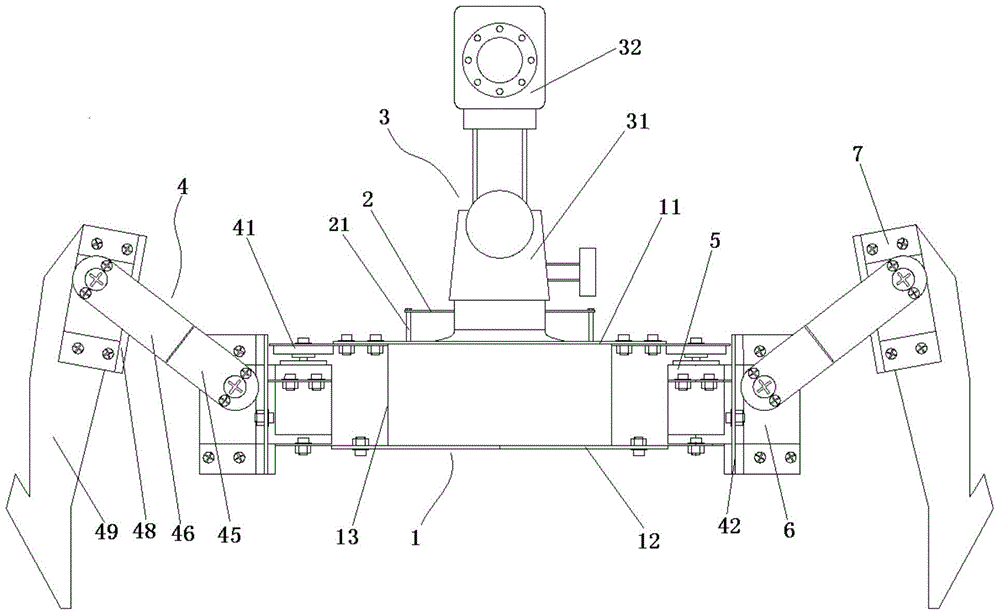
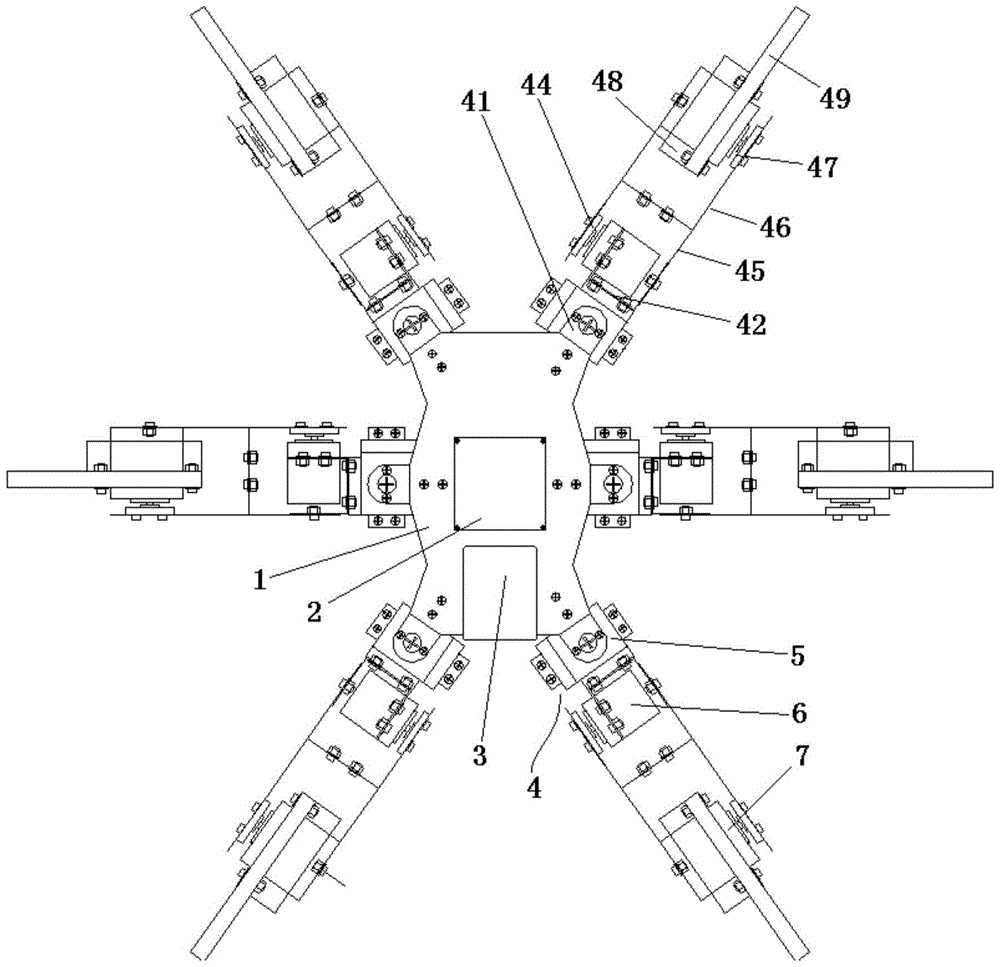
[0014] like figure 1 , figure 2 As shown, the present invention includes a main body bracket 1 , a control board 2 , an image acquisition device 3 and six bionic limbs 4 .
[0015] The main body bracket 1 of the present invention includes an upper support plate 11 and a lower support plate 12 arranged in parallel up and down, and a plurality of pillars 13 are fastened between the upper support plate 11 and the lower support plate 12 . The upper support plate 11 and the lower two support plates 12 have the same shape, and both of them taper and then gradually expand from the middle to both sides, so that the upper support plate and the lower support plate 12 form two protrusions in the middle and four at the ends, a total of six protrusions. end.
[0016] The six bionic limbs 4 of the present invention are respectively distributed on the outer side...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com