

Aircraft control method and device
A control method and aircraft technology, applied in the field of aircraft, can solve problems such as difficulty in obtaining performance parameters and difficulty in designing flight control systems, and achieve the effect of ensuring stable flight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
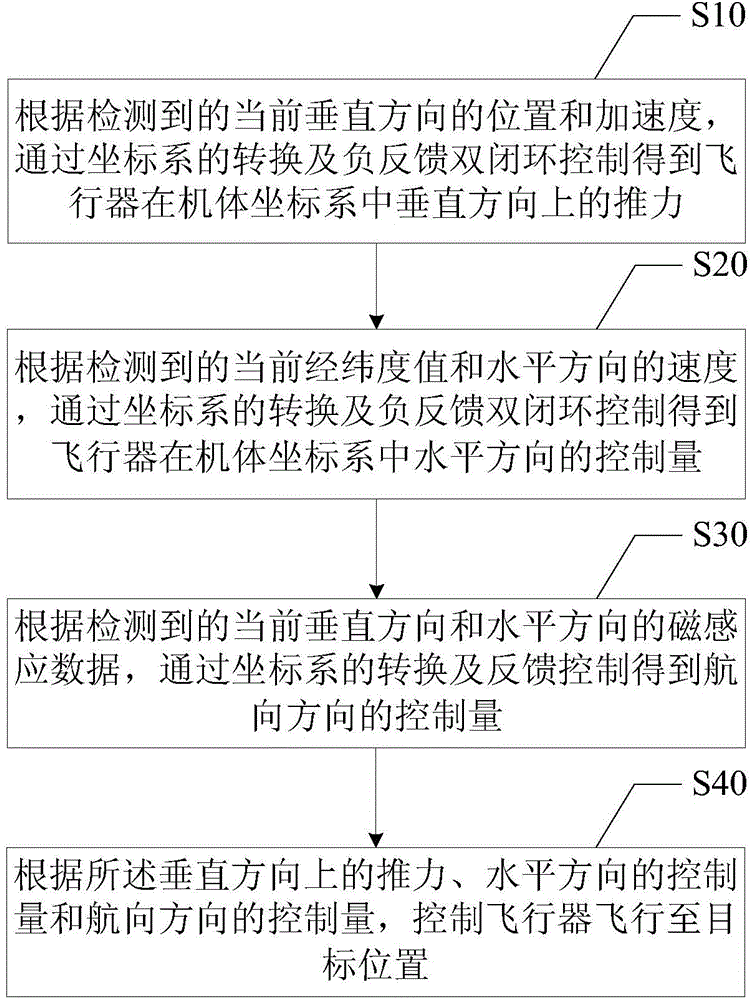
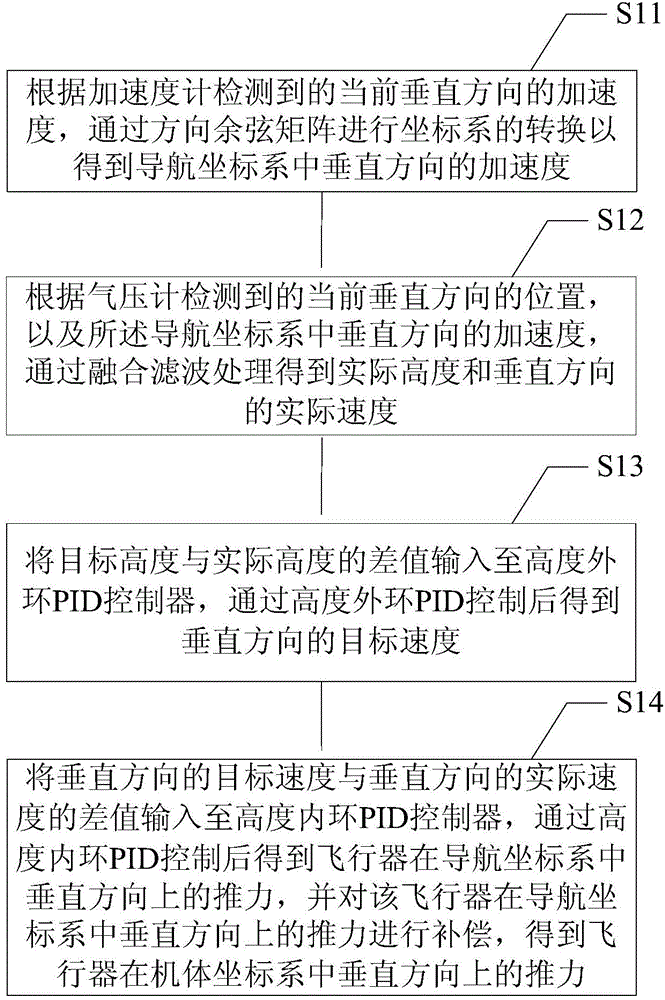
[0065] Based on the above-mentioned first embodiment of the aircraft control method of the present invention, step S10 specifically includes:
[0066] Step S11, according to the acceleration in the current vertical direction detected by the accelerometer, transform the coordinate system through the direction cosine matrix to obtain the acceleration in the vertical direction in the navigation coordinate system;
[0067] In this embodiment, the direction cosine matrix is obtained through the attitude angle (pitch angle, roll angle, and heading angle), and then the acceleration data in the body coordinate system is multiplied by the direction cosine matrix to obtain the acceleration data in the navigation coordinate system.
[0068] Step S12, according to the current vertical position detected by the barometer, and the acceleration in the vertical direction in the navigation coordinate system, the actual height and the actual speed in the vertical direction are obtained through ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More