

EtherCAT-based intelligent industrial robot bus module and operating method thereof
A technology for industrial robots and robot motion modules, which is applied in manipulators, manufacturing tools, etc., to achieve the effects of improving system responsiveness, high synchronization, and high transmission speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
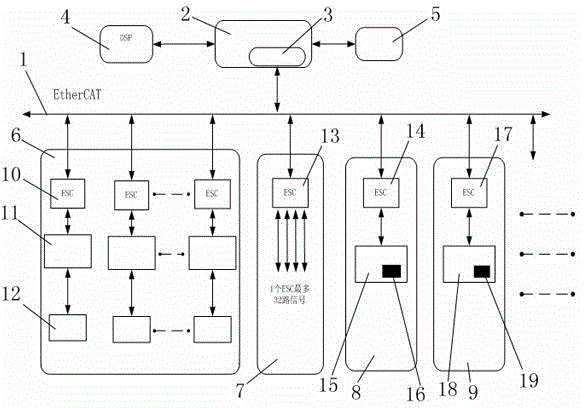
[0046] Embodiment 1: as figure 1 Shown, a kind of intelligent industrial robot bus module based on EtherCAT comprises EtherCAT bus 1, and EtherCAT bus 1 is connected with embedded microprocessor 2, is provided with Ethernet controller 3 in embedded microprocessor 2, and embedded microprocessor 2 The two ends of each are connected to each other with DSP operation part 4 and teaching box 5 respectively; / O module 7, force sense module 8, vision module 9, EtherCAT bus 1 form a topology structure;
[0047] The robot motion module includes at least one ESC motion module 10, at least one servo driver 11 and at least one AC servo motor 12, the ESC motion module 10 is connected to the servo driver 11, and the servo driver 11 is connected to the AC servo motor 12;
[0048] The I / O module includes an ESC control module 13, and the ESC control module 13 is connected with 32 signals at most;
[0049] Force sense module comprises ESC force sense module 14, force sense controller 15 and f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More