

Course-drifting-error elimination method of indoor inertial navigation positioning
An inertial navigation and heading drift technology, applied in the field of indoor navigation, to solve the heading drift error and improve the accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further described below through specific embodiments.
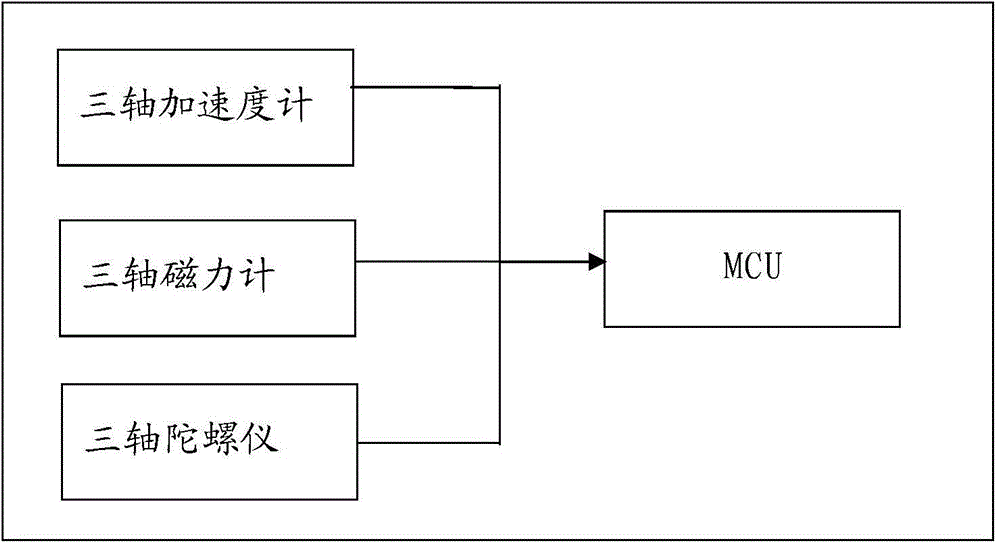
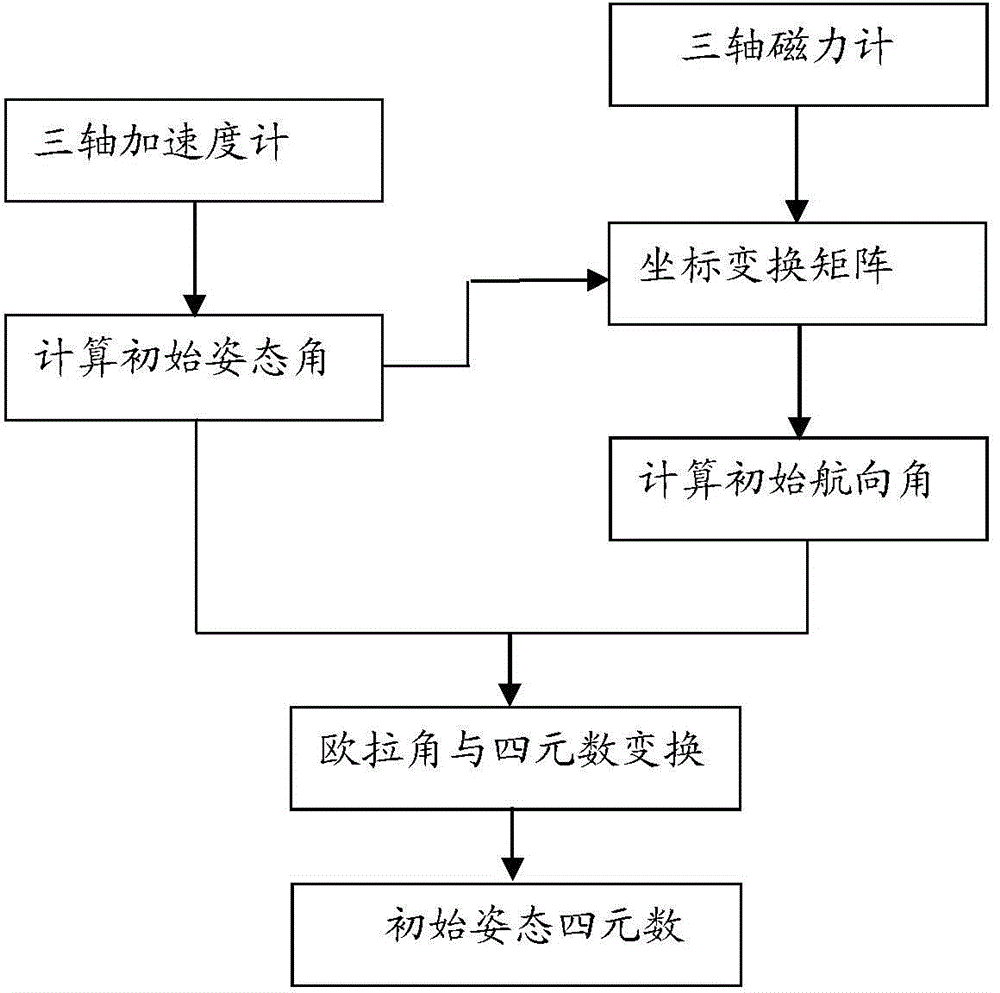
[0025] refer to Figure 1 to Figure 3 , a method for eliminating heading drift errors in indoor inertial navigation positioning is implemented based on an inertial measurement unit, which includes a three-axis accelerometer, a three-axis magnetometer, a three-axis gyroscope, and an MCU. First, calculate the initial value of the attitude quaternion through the three-axis accelerometer and the three-axis magnetometer. The initial value of the attitude quaternion is calculated by the following steps:
[0026] First, the acceleration (a x ,a y ,a z ) to determine the initial attitude angle: Among them, θ is pitch angle, γ is roll angle, g is gravitational acceleration g=9.8m / s 2 . Note that the initial position coordinate system composed of the x-axis, y-axis and z-axis of the three-axis magnetometer is b, the coordinate system parallel to the local horizontal plane is n, the inter...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More