

Uncalibrated human-computer interaction control system and method based on Kinect
A control system and human-computer interaction technology, applied in the field of information barrier-free engineering, can solve problems such as inability to accurately calibrate, color images are easily affected by lighting conditions, etc., and achieve high real-time and interactive effects.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The technical solutions of the present invention will be described in further detail below with reference to the accompanying drawings and specific embodiments.
[0020] 1 System Framework
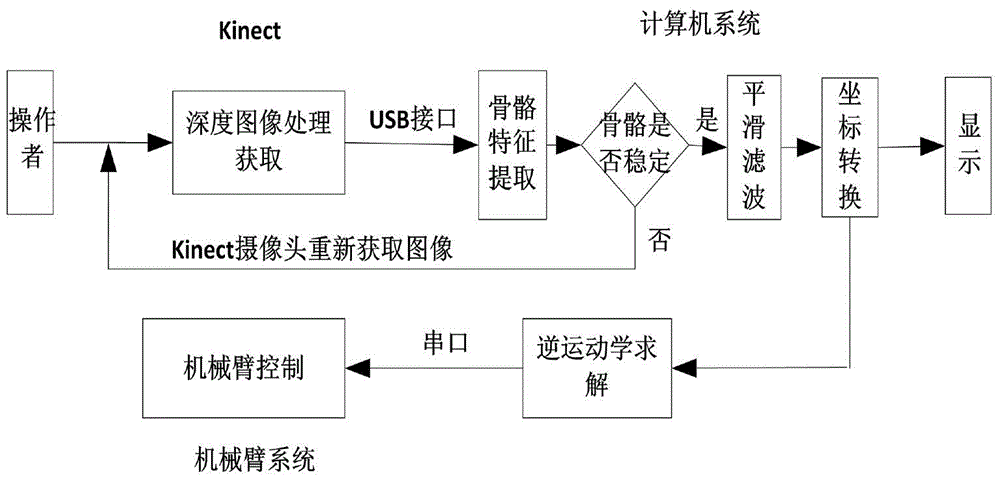
[0021] The system block diagram is as follows figure 1 shown:
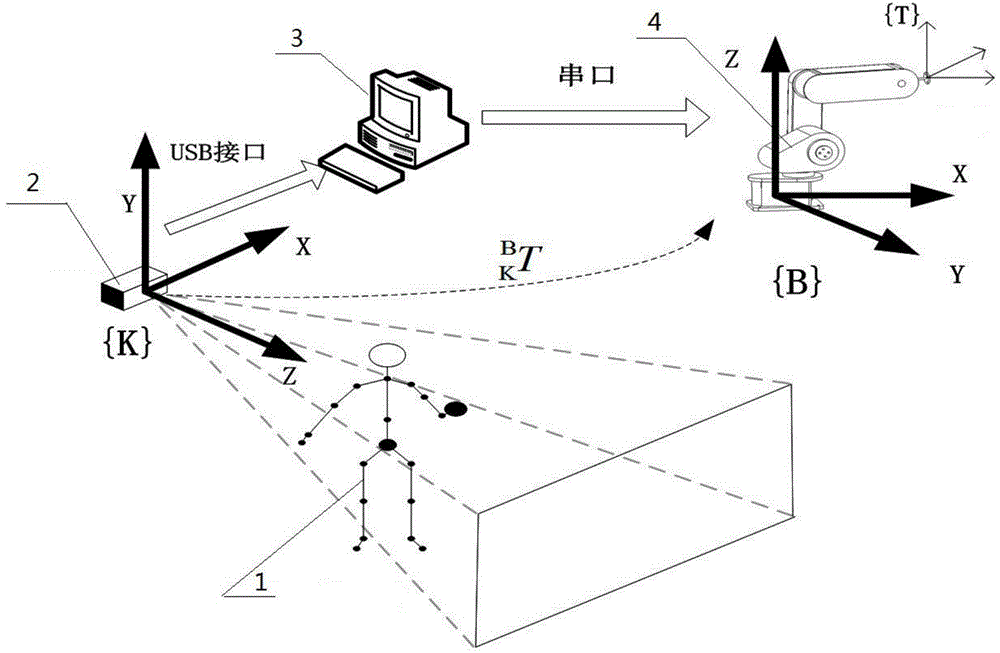
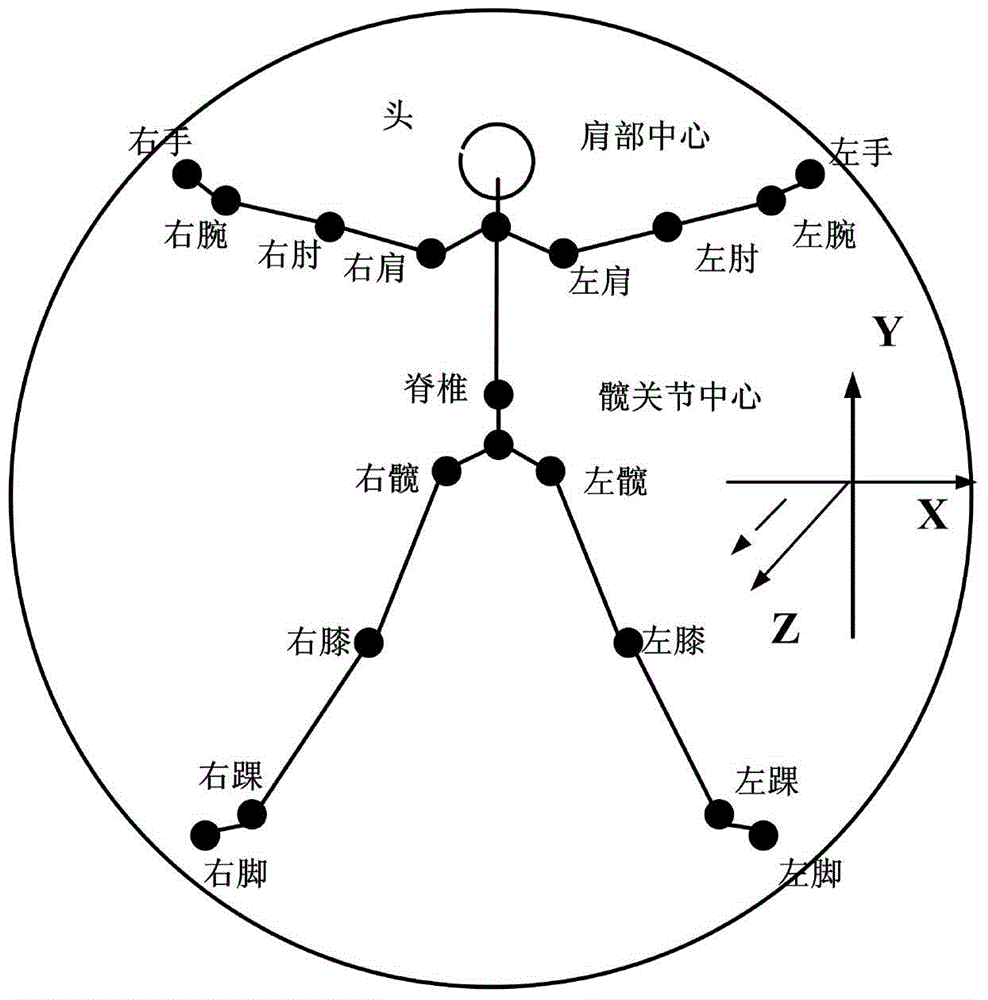
[0022] The acquisition of human depth image information is mainly completed by the Kinect sensor 2. The computer software system 3 uses the bone tracking technology to process the acquired depth of field data, and establishes 3D coordinates of 20 bone points of the human body. The robotic arm control system 4 obtains the control instructions converted by the computer system, and controls the end effector to follow the movement of the hand, so as to realize real-time guidance of the manipulator end effector by the human hand. Among them, operator 1 is in the workspace of Kinect.
[0023] 2 Obtain hand information and master-slave control method
[0024] 2.1 Introduction to Kinect
[0025] Kinect is a device develop...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Frame rate | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More