Positioning device and method of automatic charging robot
A technology of automatic charging and positioning method, applied in circuit devices, battery circuit devices, current collectors, etc., can solve problems such as inability to automatically locate electric vehicles, and achieve the effect of saving construction costs and high charging efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0039] see figure 1 shown.
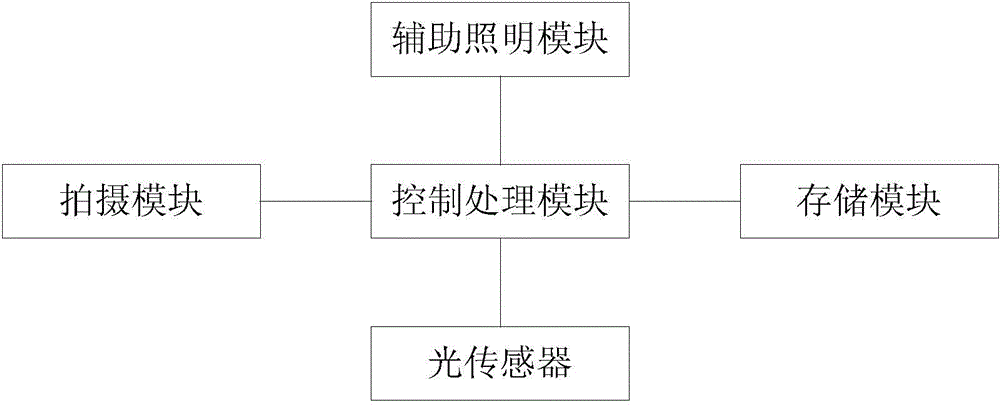
[0040] The invention provides a positioning device for an automatic charging robot, which includes a control processing module, a storage module, and a photographing module; both the storage module and the photographing module are connected to the control processing module; the storage module is used to store various models The standard characteristic value of the electric vehicle and the standard control parameter of the charging robot corresponding to the standard characteristic value; the photographing module is used to take pictures of the vehicle to be charged, and transmit the pictures to the control processing module, the The control processing module performs image processing on the photo information to obtain the actual feature value, and the control processing module compares the actual feature value with the standard feature value to obtain a control deviation. The standard control parameter and the control deviation are used to obtain ...
Embodiment 2
[0044] see figure 2 shown.
[0045] The invention provides a positioning device for an automatic charging robot, which includes a control processing module, a storage module, and a photographing module; both the storage module and the photographing module are connected to the control processing module; the storage module is used to store various models The standard characteristic value of the electric vehicle and the standard control parameter of the charging robot corresponding to the standard characteristic value; the photographing module is used to take pictures of the vehicle to be charged, and transmit the pictures to the control processing module, the The control processing module performs image processing on the photo information to obtain the actual feature value, and the control processing module compares the actual feature value with the standard feature value to obtain a control deviation. The standard control parameter and the control deviation are used to obtain...
Embodiment 3
[0048] see image 3 shown.
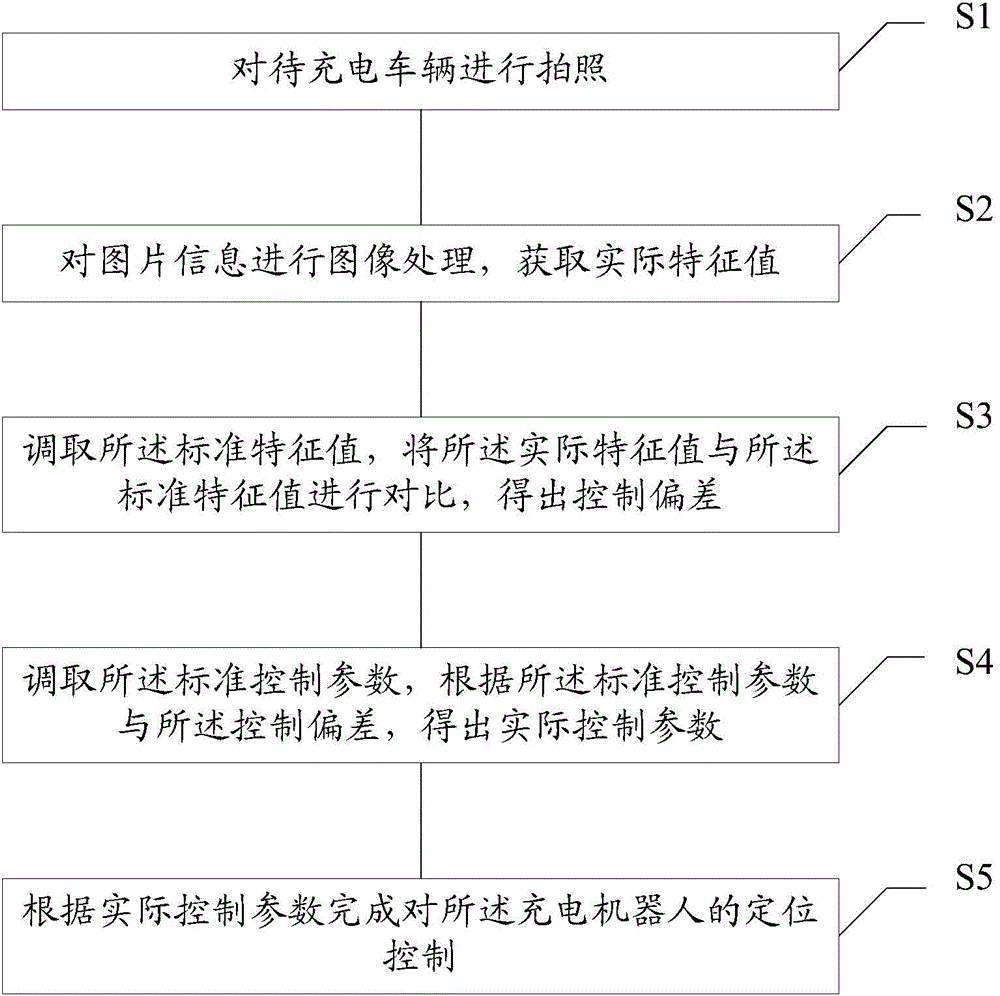
[0049] The invention provides a positioning method for an automatic charging robot, the steps of the method comprising:
[0050] S1: Taking pictures of the vehicle to be charged.
[0051] S2: Perform image processing on the photo information to obtain actual feature values.
[0052] S3: calling the standard characteristic value, comparing the actual characteristic value with the standard characteristic value, and obtaining a control deviation.
[0053] S4: calling the standard control parameter, and obtaining an actual control parameter according to the standard control parameter and the control deviation.
[0054] S5: Complete the positioning control of the charging robot according to the actual control parameters.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More