

Self-adaption MDOF (Multi-Degree Of Freedom) humanoid manipulator based on pneumatic artificial muscle
A technology of pneumatic artificial muscles and manipulators, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of large volume, not practical stage, complex structure, etc., and achieve the effect of small volume, simple mechanism and easy control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The specific structure and working principle of the present invention will be further described below in conjunction with the embodiments shown in the accompanying drawings.
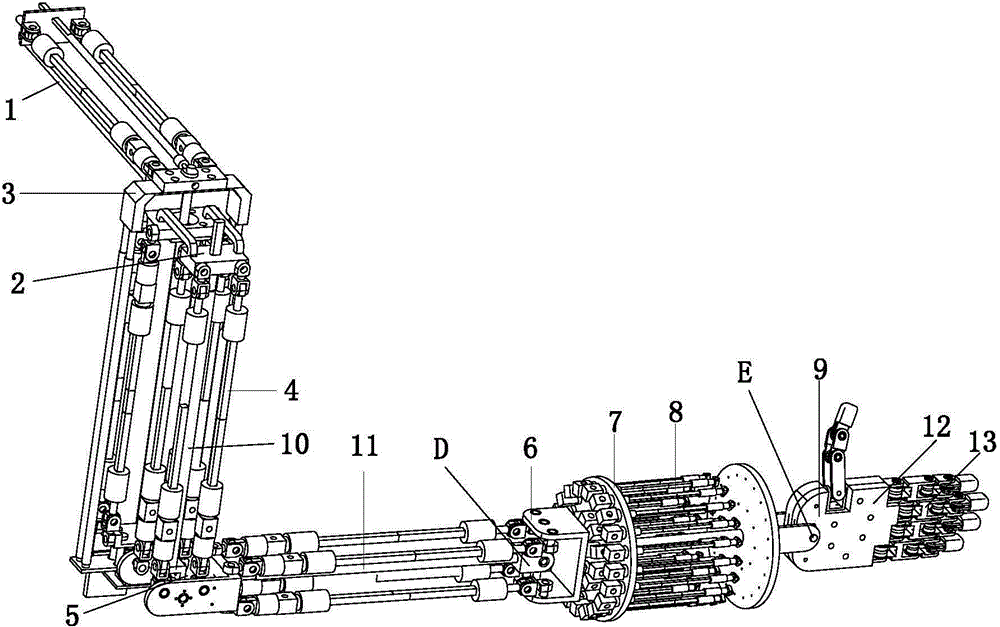
[0031] Pneumatic artificial muscles, as a new type of actuator with high power-to-weight ratio and compliance, have the advantages of small size and simple structure. First of all, pneumatic artificial muscles are similar to biological muscles, and can be directly installed inside the manipulator to imitate biological muscles. The robot manipulators driven by pneumatic artificial muscles are all slimmer and lighter in appearance, and compared with other driving methods, the robot manipulators have lower stiffness. Therefore, this type of robot manipulator has both safety and flexibility. In addition, according to the characteristics of contraction and responsiveness of the pneumatic muscle, its movement is closer to that of human muscle movement, so as to realize the function of humanoid manipulat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More