

Modular robot driver based on EtherCAT and control method
A control method and robot technology, applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., can solve problems such as limited joint space, difficulty in improving joint performance, and complex electromagnetic environment, so as to save overall cost, reduce joint components, and improve reliability effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be further described in detail below in conjunction with the accompanying drawings and implementation examples.
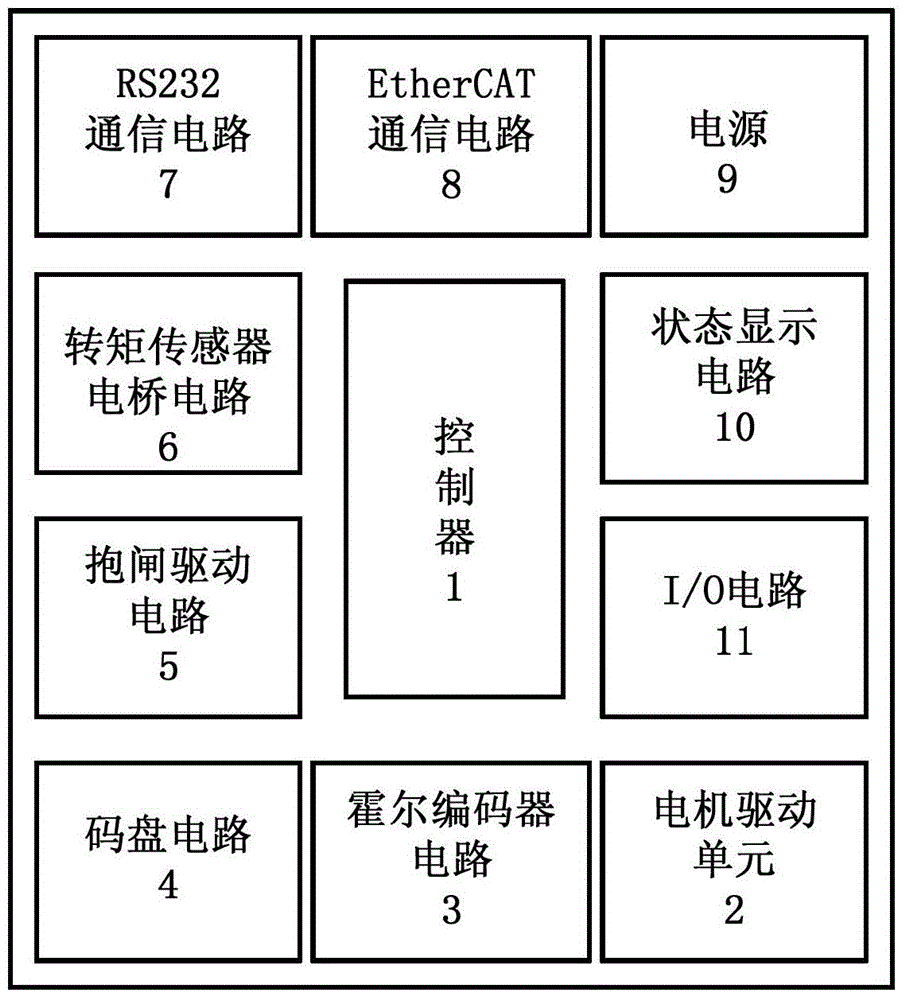
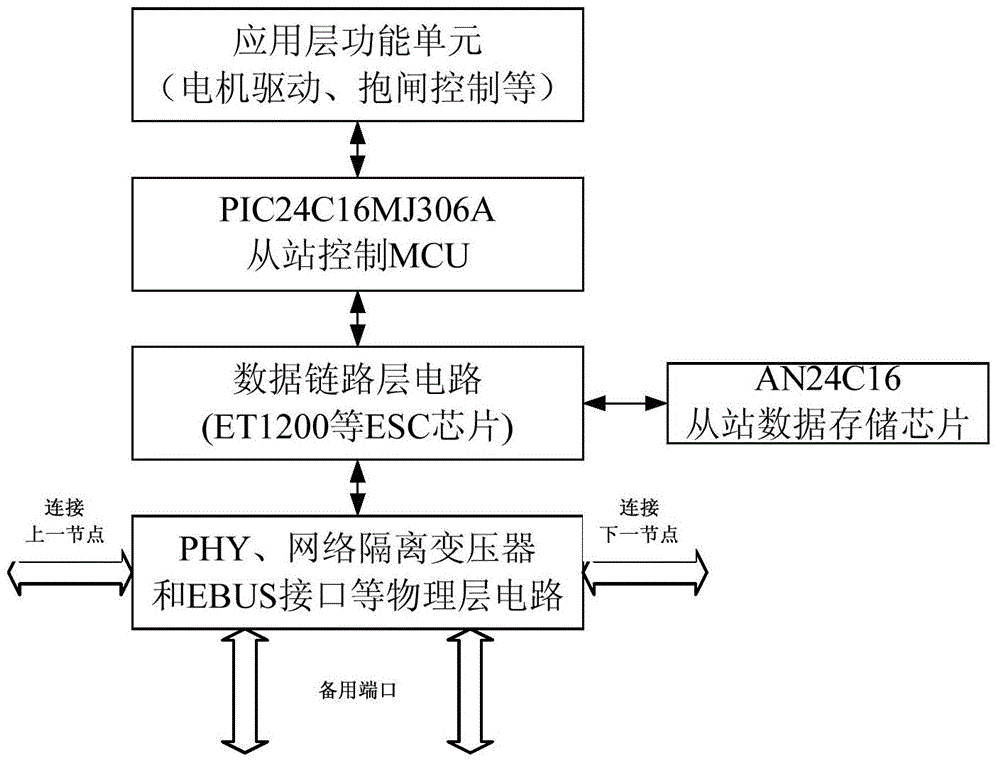
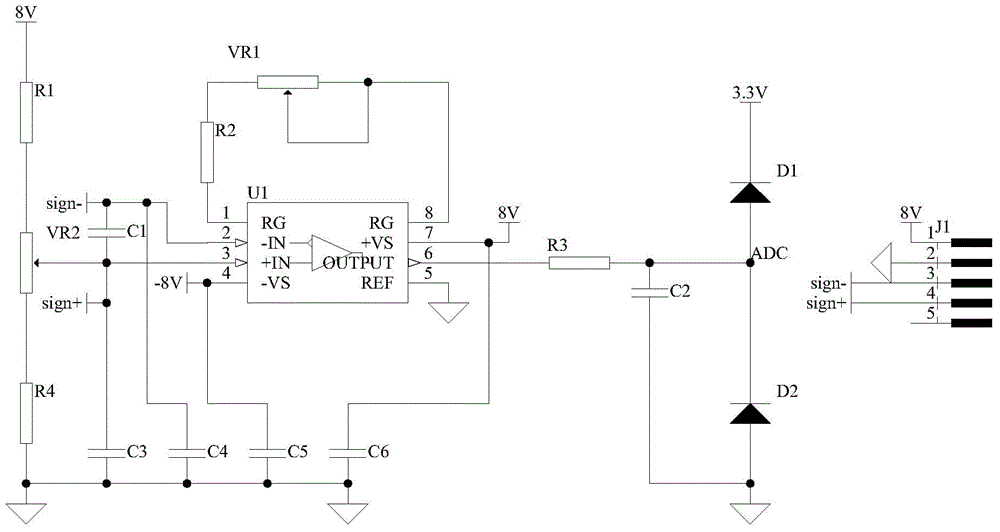
[0037] A modular joint driver applying EtherCAT bus communication technology, including a core controller, a motor drive unit, a HALL encoder circuit, an NRZ encoder circuit, a brake circuit, a torque sensor bridge circuit, an RS232 communication circuit, and an EtherCAT communication circuit , power supply, status display circuit, STO and I / O circuit, application layer program. The method includes: executing the program with the core controller, running the algorithm, driving the motor, completing the three closed loops, and realizing the communication with the host; realizing the data link layer and the physical layer communication of the EtherCAT protocol with the ESC control chip and the PHY chip; on the core controller Write programs to implement application layer functions.
[0038] like figure 1 As shown, the device includ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More