

Index finger force feedback device
A technology of force feedback and index finger, which is applied in instruments, electrical digital data processing, manipulators, etc., can solve the problems of expensive force feedback data gloves, complex systems, and difficult maintenance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
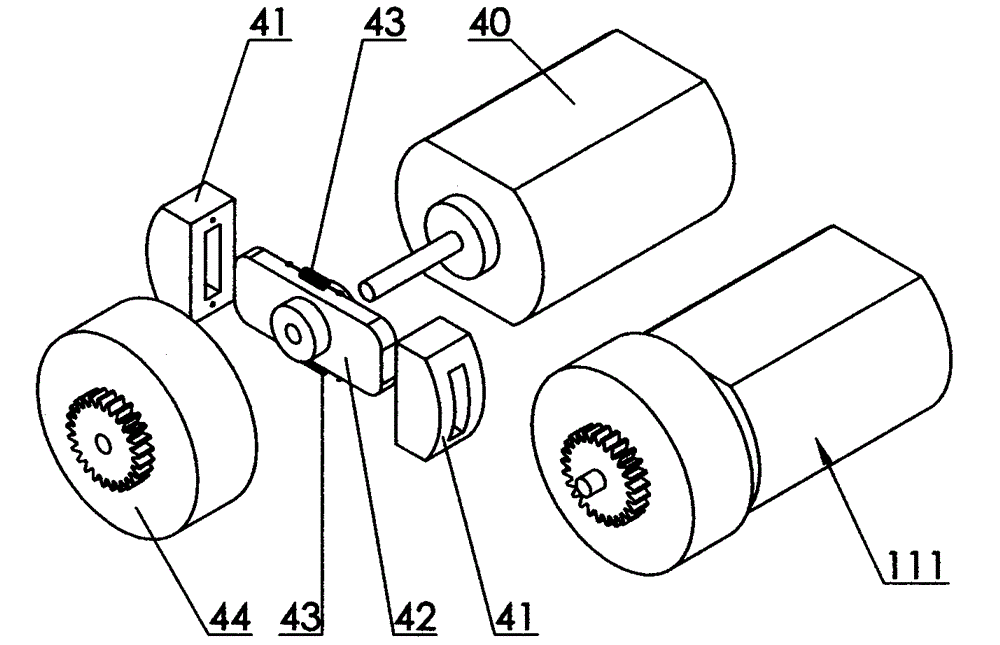
[0018] Specific implementation mode one: as figure 2 As shown, the index finger force feedback device includes a driving part 111, and the driving part 111 includes a micro motor 40 and a clutch, and the clutch is composed of a clutch friction plate 41, a friction plate slide bar 42, a return tension spring 43, and a clutch cover 44. The friction plate slide bar 42 is fixedly connected to the shaft of the micro motor 40, the two clutch friction plates 41 are inserted into the two ends of the friction plate slide bar 42 respectively, and a return tension spring 43 is connected between the two clutch friction plates 41, and the clutch The cover 44 is inserted into the shaft of the micro motor 40, and the clutch cover 44 is in sliding contact with the shaft of the micro motor 40, and the clutch cover 44 is provided with transmission gears. Action implementation process: when the rotation speed of the micro motor 40 is higher than a certain value, the two clutch friction plates 4...
specific Embodiment approach 2
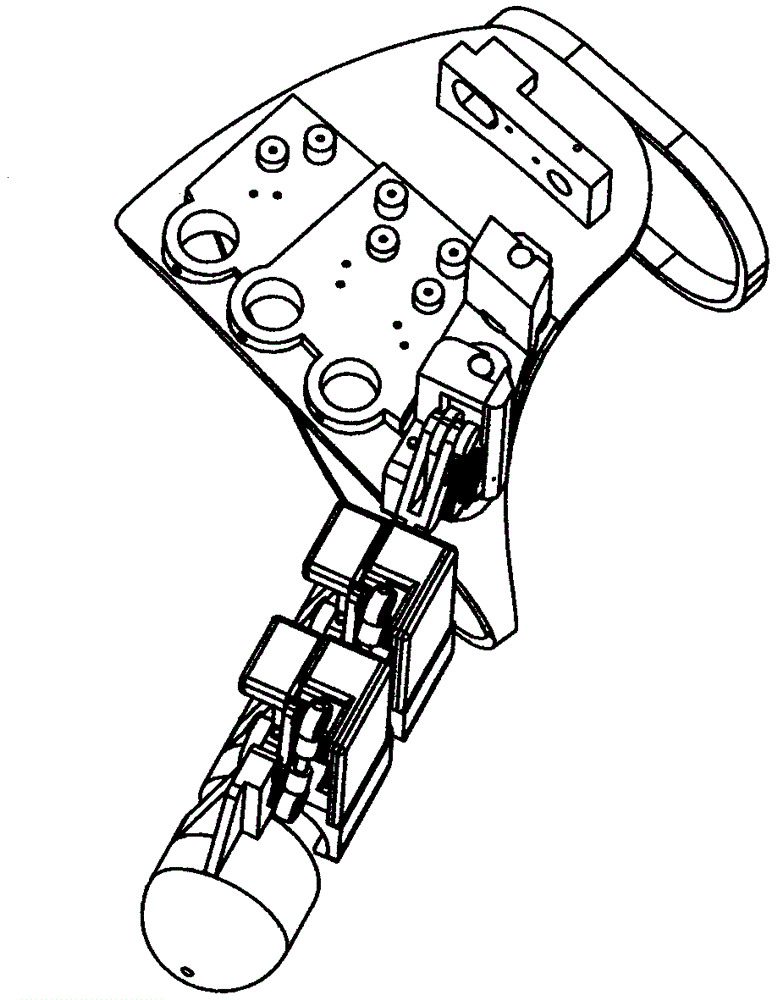
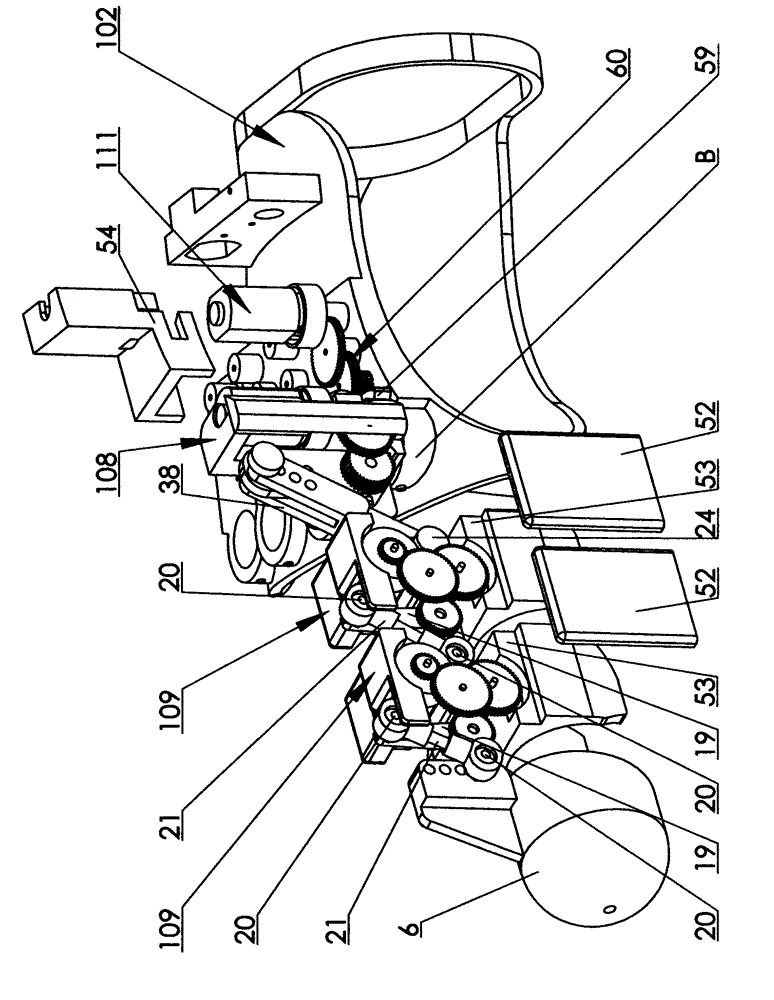
[0019] Specific implementation mode two: as figure 1 , Figure 4 and Figure 5 As shown, the metacarpophalangeal joint detection driving mechanism 108 includes a driving component 111 , a rocker arm 27 , a metacarpophalangeal joint base 29 , a connecting rod 38 , a gear case cover 50 and two angle sensors 18 . The bottom of metacarpophalangeal joint base 29 (embedded bearing 39) is affixed to the shaft of an angle sensor 18 by screws 36, and said metacarpophalangeal joint base 29 can rotate around the axis of bottom angle sensor 18. The outer edge of the base 29 bottom is provided with a gear 59, the axis of the gear 59 coincides with the axis of the angle sensor 18 at the bottom of the metacarpophalangeal joint base 29, and another angle sensor 18 is fixed on the bottom of the metacarpophalangeal joint base 29 by a screw 35. In the hole seat L, the shaft of the angle sensor 18 and one end of the rocking arm 27 (embedded bearing 23) are fixedly connected by a screw 36, and t...
specific Embodiment approach 3
[0020] Specific implementation mode three: as figure 1 , Figure 6 and Figure 7 As shown, the joint detection driving mechanism 109 includes a driving component 111 , an angle sensor 18 , a rocker arm 19 , a gear case cover 51 , a gear case cover 52 and a knuckle base 53 . The knuckle base 53 is provided with a hole seat M and a row of mounting holes Q for ball heads 20 or screws 24, and the angle sensor 18 is fixed in the hole seat M of the knuckle base 53 by screws 36, The shaft of the angle sensor 18 in the hole seat M is fixedly connected with the rocking arm 19 by a screw 35, the gear axis on the rocking arm 19 coincides with the axis of the rocking arm rotation, and the gear of the rocking arm 19 is decelerated The gear set 60 is engaged with the gear of the driving part 111 , the driving part 111 is installed on the knuckle base 53 , and the other end of the rocker arm 19 is fixedly connected to the ball head 20 .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More