

Synchronous coordinated control method of series-parallel automobile electrophoretic painting conveying mechanism
A conveying mechanism and electrophoretic coating technology, applied in electrolytic coating, electrophoretic plating, coating, etc., can solve problems such as difficult to obtain accurate dynamic parameters, difficult to control effects, and irreversible synchronization errors of connecting rods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0111] The Fangming control method mainly focuses on solving the synchronous coordination control problem of the hybrid automobile electrophoretic coating conveying mechanism with a synchronous coordination control technology, and realizes high-performance control of the mechanism. The specific implementation of this control method is as follows:
[0112] 1. Solve the Jacobian matrix
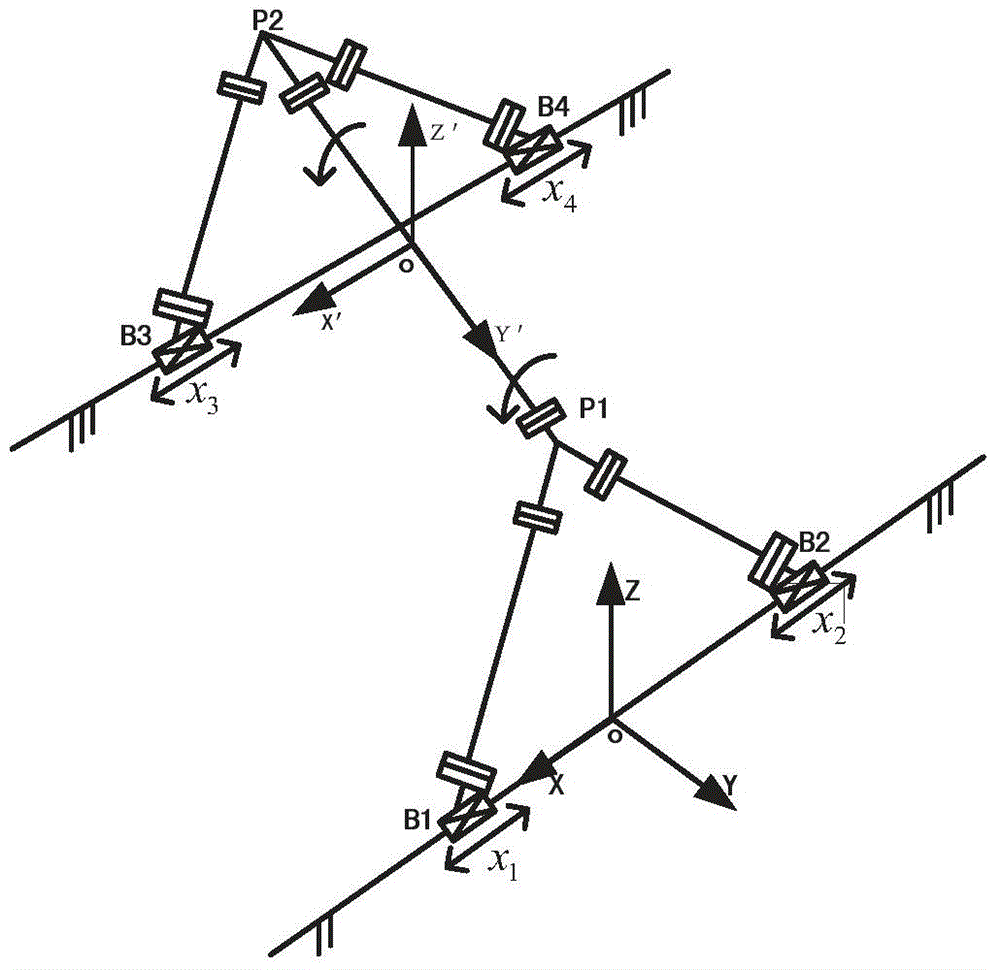
[0113] exist figure 2 In this method, the rod length constraint equation is used, and the kinematics inverse solution equation of the mechanism can be obtained according to the structure of the lifting and turning mechanism:
[0114] x 1 2 + z 1 2 = L 1 2 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More