Method for controlling tri-axis stabilization tripod head with brushless motors by using single IMU sensors
A brushless motor and sensor technology, applied in the direction of control using feedback, can solve the problems of few detection schemes, complex, unable to provide absolute angle, etc., to achieve the effect of improving efficiency and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
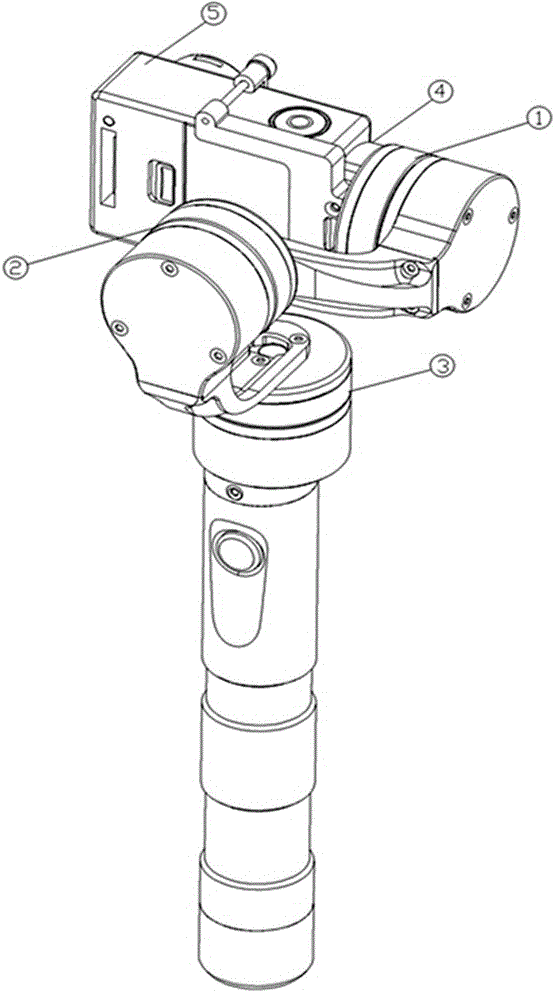
[0013] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0014] refer to figure 1 , the present invention uses a single IMU sensor to realize a method for three-axis brushless motor stabilized pan-tilt control. There are three control boards in the covers of the pitch axis, roll axis and direction axis respectively, and each board has a Magnetic encoders, they respectively measure the angles of the pitch axis motor (1), roll axis motor (2) and direction axis motor (3), which can realize the calculation of the angular rate of the three-axis gimbal motor and the calculation of attitude state information. The attitude board (4) is connected to the camera (5), which is the gimbal carrier. There are MEMS three-axis gyroscopes and three-axis accelerometers on the attitude board, which can realize the angular rate feedback control of the three-axis gimbal motor and the attitude angle of the three-axis gimbal feedba...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com