Ultra-small dual-duct unmanned plane combined navigation system and dual-mode navigation method
An integrated navigation system and integrated navigation technology, which is applied in the field of special robot navigation control, can solve the problems that the accumulation of sensor errors cannot be corrected in time, the inability to adapt to the working characteristics of GPS, and the decline in navigation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0068] Below in conjunction with accompanying drawing and preferred embodiment the present invention is described in further detail:
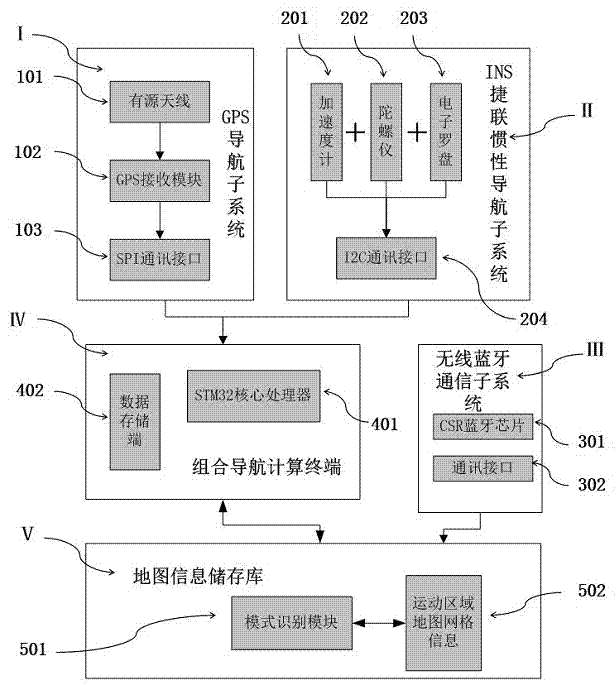
[0069] Such as figure 1 As shown, an ultra-small dual-channel UAV integrated navigation system consists of GPS navigation subsystem Ⅰ, INS strapdown inertial navigation subsystem Ⅱ, wireless Bluetooth communication subsystem Ⅲ, integrated navigation computing terminal Ⅳ, map information storage V consists of five parts; the GPS navigation subsystem I and the INS strapdown inertial navigation subsystem II are respectively connected to the integrated navigation computing terminal IV, and the wireless bluetooth communication subsystem III and the integrated navigation computing terminal IV are respectively connected to the map information storage Library V is connected.
[0070] The GPS navigation subsystem I includes an active antenna 101, a GPS receiving and processing module 102 connected in sequence, and an SPI communication interface circuit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More