

Intelligent underwater robot autonomous butting method based on bi-sight-vision guiding
An underwater robot and vision-guided technology, applied in instruments, image data processing, computing, etc., can solve problems such as low accuracy, poor reliability, and small operating distance, and achieve high accuracy, high reliability, and noise suppression. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be described in further detail below with examples in conjunction with the accompanying drawings.
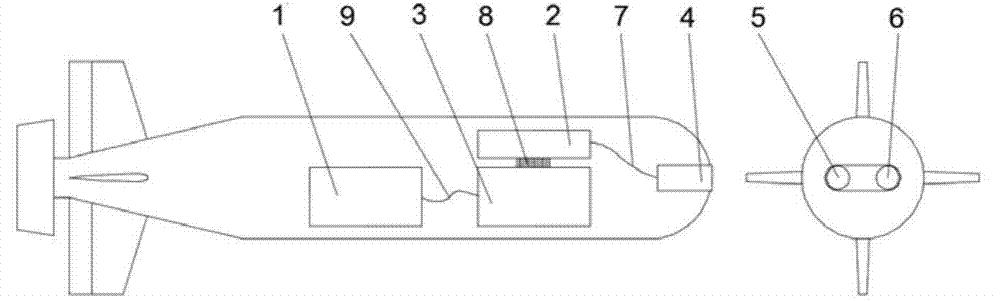
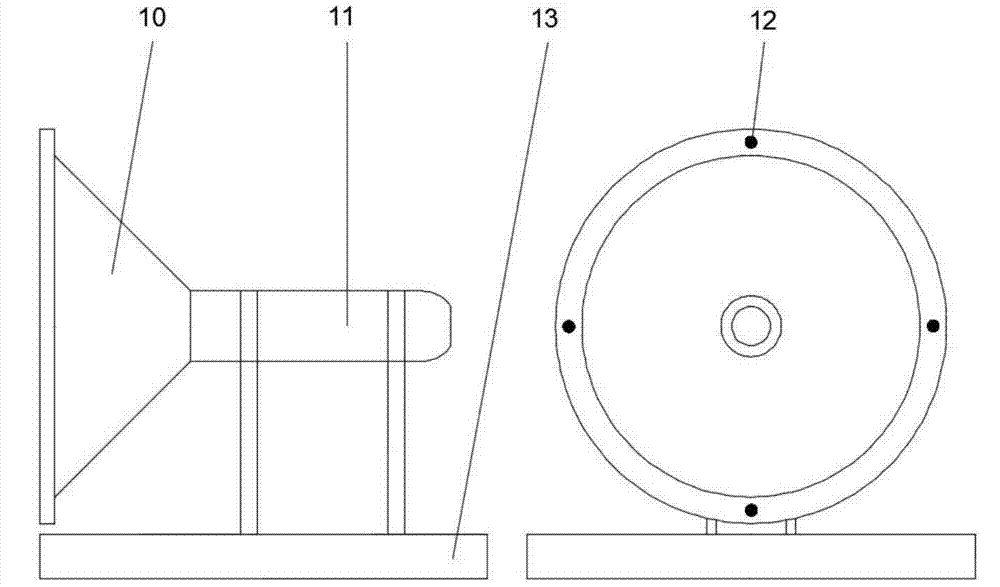
[0037] The intelligent underwater robot has a typical underactuated form of rudder-wing joint control. A binocular vision system is installed on its bow, and an image acquisition module, an optical vision processing computer and a motion control computer are installed in its sealed instrument cabin. The docking device has Conical guide cover and butt joint form structure, and the guide light source is installed on the outer edge of the conical guide cover.
[0038] The purpose of the present invention is to provide an autonomous docking method for an intelligent underwater robot based on binocular vision guidance. This method aims at the shortcomings of the existing optical vision guidance method, such as low accuracy, poor reliability, and small operating distance. Binocular vision guides the intelligent underwater robot to obtain the precise p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More