

Multi-ship encounter collision prevention method for bacterial foraging optimization
A technology for bacterial foraging and collision avoidance, which is applied in the field of automatic collision avoidance path planning for ships, and can solve problems such as low solution accuracy, slow convergence speed, and premature maturity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention is described in more detail below in conjunction with accompanying drawing
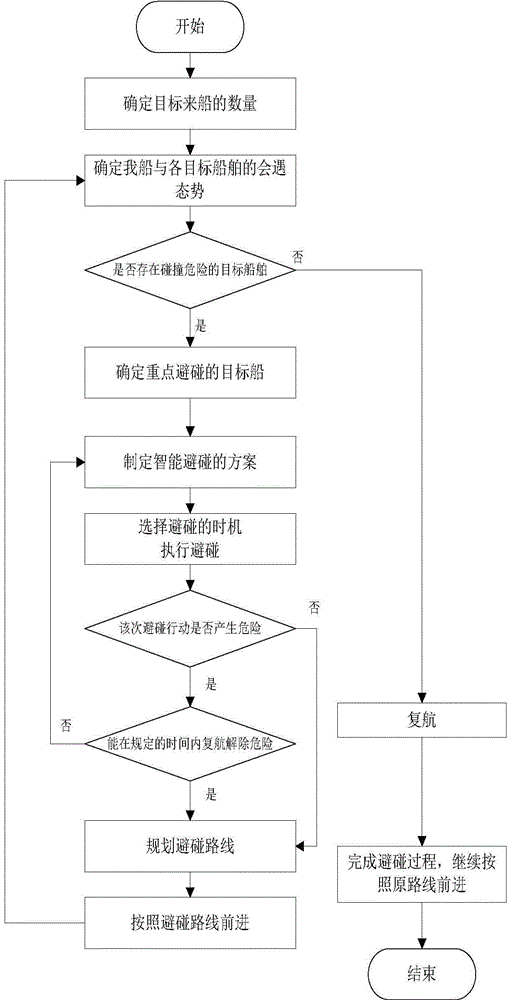
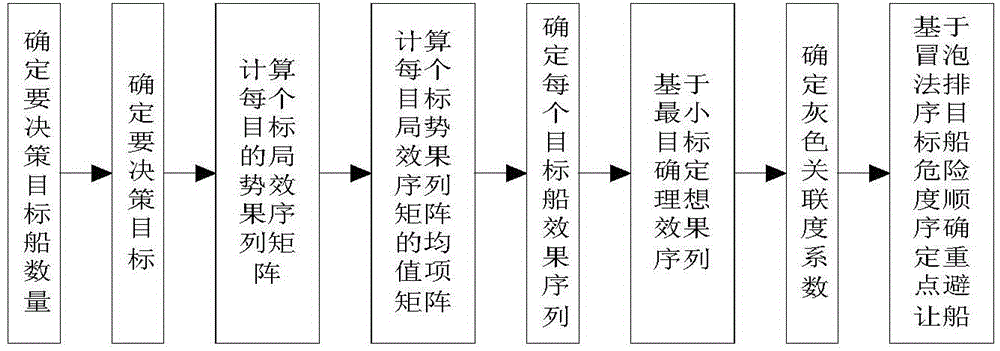
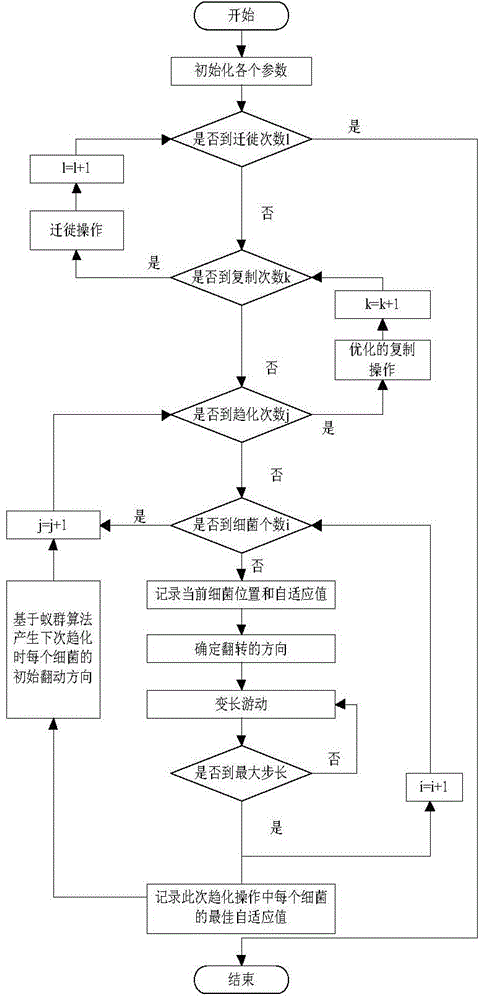
[0046] The invention proposes a multi-ship collision avoidance method optimized for bacteria foraging, and belongs to the technical field of ship collision avoidance route planning. Taking our ship as the avoidance ship as the premise, the method includes: obtaining target ship information, judging the encounter situation between ships, establishing an objective function for multi-ship encounter collision avoidance, determining the cycle key collision avoidance ship, and formulating a foraging algorithm based on optimized bacteria The anti-collision plan of the ship, the implementation of cyclical anti-collision actions, our ship resumed its voyage, and continued sailing according to the original route. On the one hand, the present invention optimizes the trend operation in the bacterial foraging algorithm based on particle swarm optimization, improves the convergence spee...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More