

Multi-legged biomimetic robot with metamorphic mechanism on waist
A technology of bionic robot and metamorphic mechanism, which is applied in the fields of motor vehicles, transportation and packaging, etc. It can solve the problems that the waist cannot move, can not imitate multiple animal forms at the same time, and the movement and adaptive adjustment have no effect, so as to improve the The effect of flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0019] Embodiment 1. A multi-legged bionic robot using a metamorphic mechanism at the waist, and has four open chain structures.
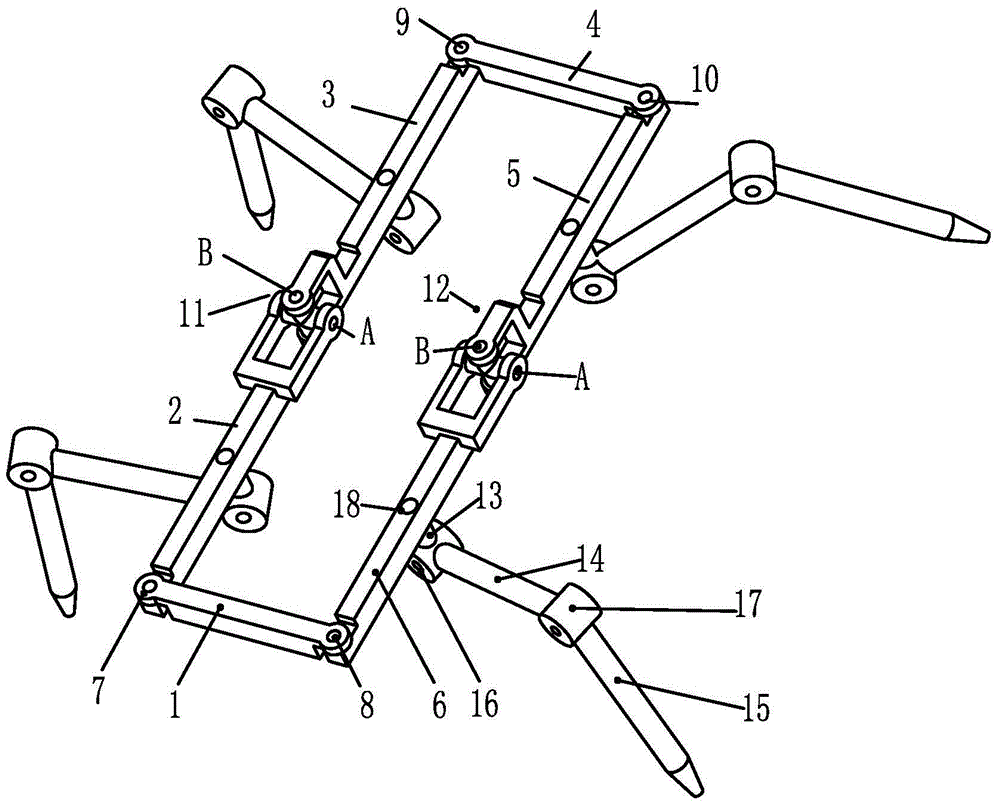
[0020] Such as figure 1 As shown, the present invention proposes a multi-legged bionic robot using a metamorphic mechanism at the waist, including a closed chain and four open chains, the closed chain is composed of the first bar 1, the second bar 2, the third bar 3, A metamorphosis six-bar mechanism formed by the fourth bar 4, the fifth bar 5 and the sixth bar 6.
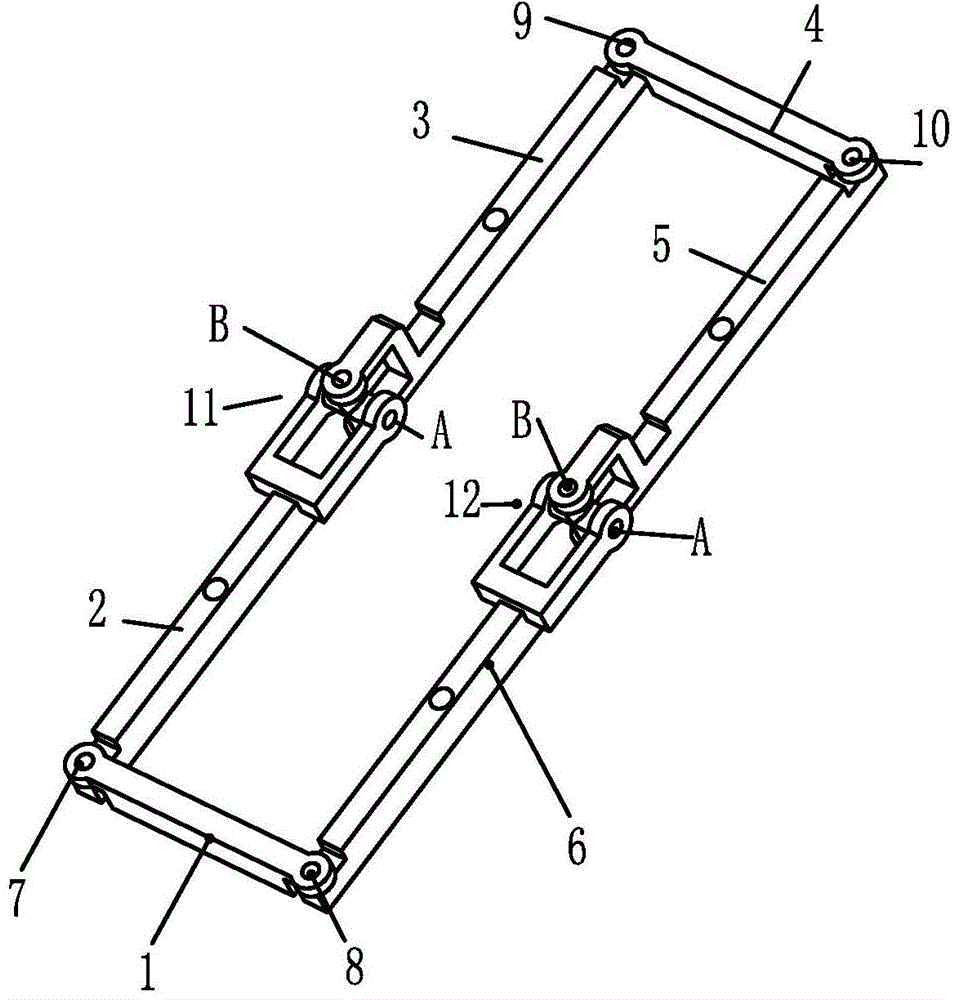
[0021] Such as figure 2 As shown, the two ends of the first bar 1 are respectively connected with one end of the second bar 2 and one end of the sixth bar 6 through the first rotary hinge 7 and the second rotary hinge 8, and the first rotary hinge 7 and the second rotary hinge 8 The axes are parallel to each other; the two ends of the fourth bar 4 are respectively connected with one end of the third bar 3 and one end of the fifth bar 5 through the third rotary hinge 9 and the fourth ...
Embodiment 2
[0031] Embodiment 2: A multi-legged bionic robot using a metamorphic mechanism at the waist, and has six open chain structures.
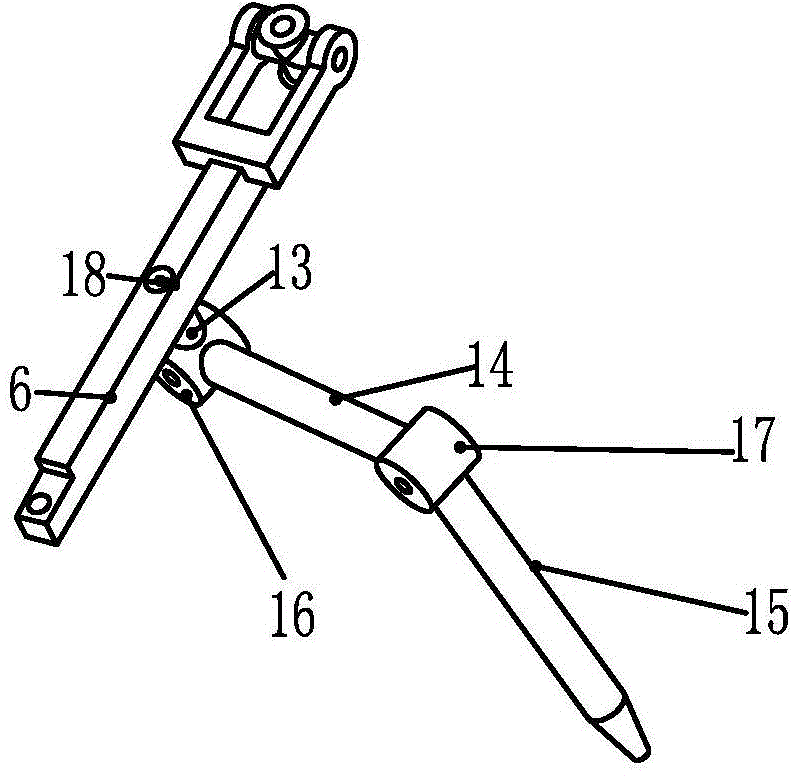
[0032] Figure 7 Shown is the embodiment of the present invention with six open chains, the structures of the six open chains are the same, and each open chain is a 2R series mechanism. Such as image 3 As shown, each open chain includes a seventh bar 13, an eighth bar 14 and a ninth bar 15 respectively, and the seventh bar 13, the eighth bar 14 and the ninth bar 15 are located in the same plane, and the eighth bar 14 and the ninth bar 15 are located in the same plane. Both ends of the rod 14 are respectively connected to the seventh rod 13 and the ninth rod 15 through the fifth rotating hinge 16 and the sixth rotating hinge 17, and the axes of the fifth rotating hinge 16 and the sixth rotating hinge 17 are parallel to each other.
[0033] Such as Figure 7 As shown, the seventh bar 13 in the six open chains is connected with the first bar 1, the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More