Flexible satellite neural network backstepping sliding mode attitude control method
What is AI technical title?
AI technical title is built by PatSnap AI team. It summarizes the technical point description of the patent document.
A flexible satellite and backstepping sliding mode technology, which is applied in attitude control and other directions, can solve the problems of antenna rotation disturbance, steady-state accuracy and stability, and needs to be improved.
Active Publication Date: 2015-09-09
HARBIN INST OF TECH
View PDF4 Cites 25 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
[0010] The invention aims to solve the disturbance problem caused by the flexible vibration of the sailboard and the rotation of the antenna, as well as the problem that the steady-state accuracy and stability of the existing attitude control method need to be improved
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
specific Embodiment approach 1
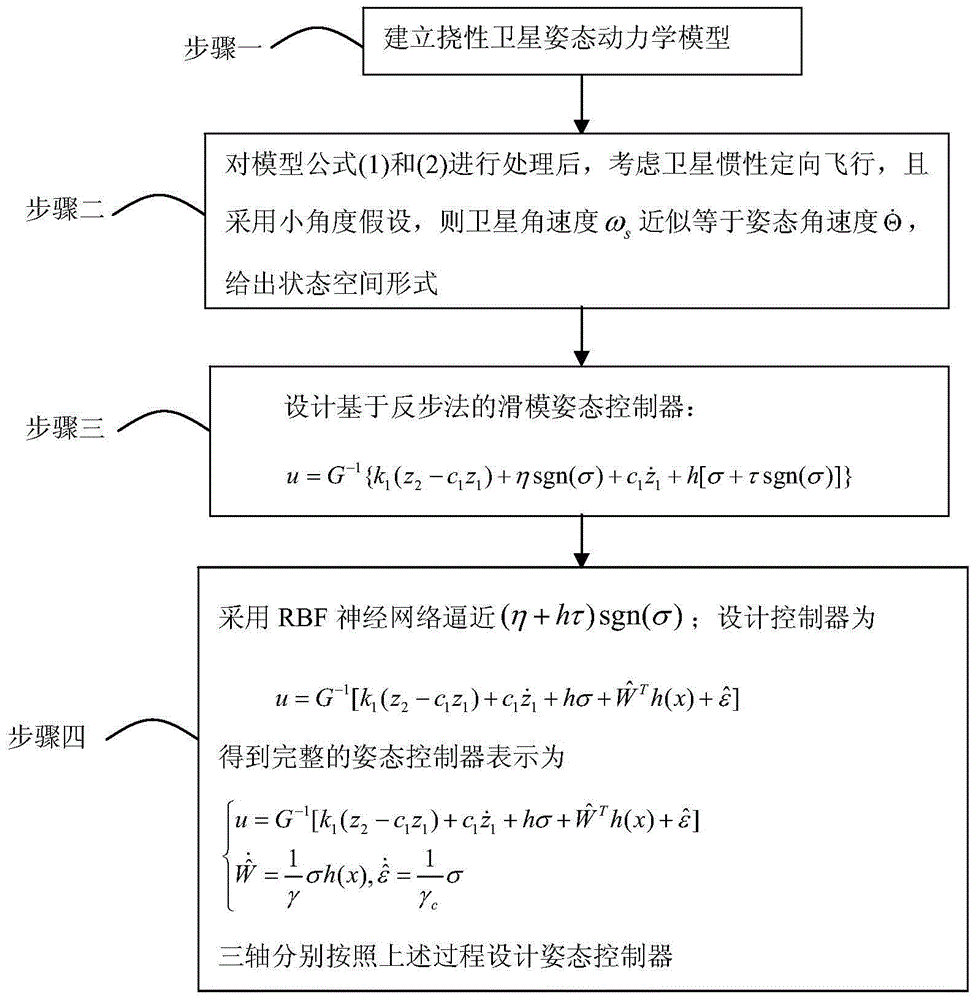
[0047] Specific embodiment one: a kind of flexible satellite neural network backstepping sliding mode attitude control method, comprises the following steps:
[0048] Step 1: Establish a flexible satellite attitude dynamic model:
[0049] The attitude dynamics model of the flexible satellite is established by using the hybrid coordinate method, and the dynamic equation containing two sailboards and a moving antenna has the following form:
[0050] I s ω · s + ω s × I s ω s + Σ ...
specific Embodiment approach 2
[0070] Specific implementation mode two: the specific implementation process of step 2 described in this implementation mode is as follows:
[0071] Using Euler angles to describe the satellite attitude, and considering the X-Y-Z sequence, the corresponding rotation attitude angles are the satellite attitude roll angles Satellite attitude pitch angle θ and satellite attitude yaw angle ψ, when the satellite is in inertial orientation flight, ω s Expressed as
[0072]
[0073] From the above formula, the satellite attitude kinematics equation is
[0074]
[0075] Figure 5 is a schematic diagram of a satellite structure with a moving antenna; Figure 5 Shown, where the coordinate system OX b Y b Z b is the satellite body coordinate system, OX a1 Y a1 Z a1 is the antenna support arm coordinate system, OX a Y a Z a is the coordinate system of the antenna body; assuming that the antenna is installed in the negative direction of the yaw axis of the satellite body,...
specific Embodiment approach 3
[0100] Specific implementation mode three: the specific implementation process of step 3 described in this implementation mode is as follows:
[0101] Step 3.1, set tracking error z 1 =x d -x 1 ; x d is the reference input, x d When it is 0, there is z 1 =-x 1 ;
[0102] Virtual control amount z 2 = z · 1 + c 1 z 1 = - x 2 + c 1 z 1 , but z · 1 = z 2 - c 1 z 1 , where c 1 is the parameter to be designed, c 1 >0;
[0103] Take the Lya...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention provides a flexible satellite neural network backstepping sliding mode attitude control method, relates to a flexible spacecraftattitude control method, and aims at solving a problem of perturbation generated by plate flexible vibration and antenna rotation and a problem of enhancement of steady state precision and stability of existing attitude control methods. According to the method, a flexible satellite attitude kinetic model is established firstly according to a spacecraft, and then a model formula is processed; a sliding mode attitude controller (which is expressed in the specification) based on a backstepping method is designed; then an RBF neural network approach (eta+htau)sgn(sigma) is adopted; the controller (which is expressed in the specification) is designed; and finally a complete attitude controller (which is expressed in the specification) is obtained. A three-axis attitude controller is designed respectively according to the aforementioned process. The flexible satellite neural network backstepping sliding mode attitude control method is suitable for the field of flexible spacecraft attitude control.
Description
technical field [0001] The invention relates to a method for controlling the attitude of a flexible spacecraft. Background technique [0002] With the rapid progress of science and technology and the continuous development of social economy, human beings have explored space more deeply, and the aerospace industry of various countries has developed rapidly and achieved dazzling achievements. Since the former Soviet Union launched the world's first artificial earth satellite in the 1950s, the research on application satellites with various functions has formed a new direction of the aerospace industry, including scientific experiment satellites, meteorological satellites and communication satellites. They are of great value economically, militarily, scientifically, educationally and culturally. [0003] The satellite with large flexible solar panels and flexible or rigid tracking antenna is a large flexible multi-body spacestructure system. There is a strong coupling effect...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More