

Device and method for road surface identification in low-definition video streaming
A low-definition, road surface recognition technology, applied in the field of road surface recognition, can solve problems such as the inability to accurately detect the road surface range, the inability to obtain V/U disparity maps, and noise sensitivity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be described in detail below in conjunction with the accompanying drawings.
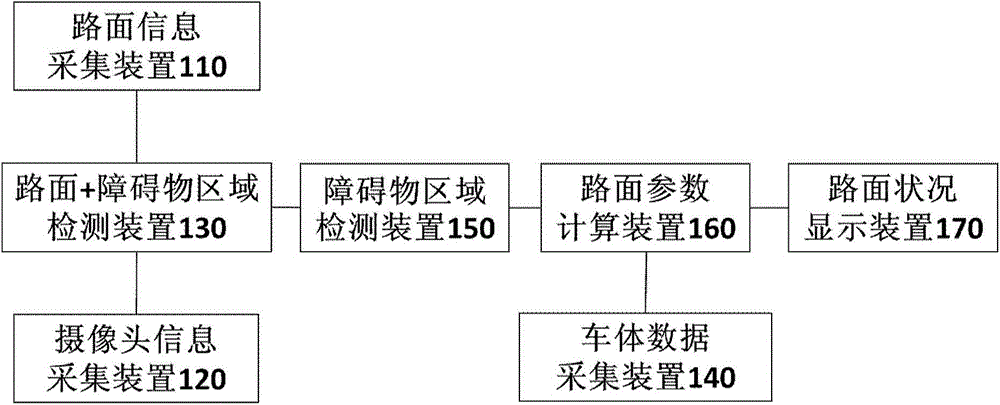
[0029] figure 1 is a block diagram showing the structure of a low-definition video information environment recognition driving assistance apparatus according to an embodiment of the present invention.
[0030] Such as figure 1 As shown, the surrounding environment recognition driving assistance device according to the present invention may include: a road surface information collection device 110, a camera information collection device 120, a road surface + obstacle area detection device 130, a vehicle body data collection device 140, and an obstacle area detection device 150 , a road surface parameter calculation device 160 , and a road surface condition display device 170 . According to the present invention, the surrounding environment recognition driving assistance device can be mounted on a vehicle or the like to assist the driving of the vehicle or the like i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More