

Five-degree-of-freedom parallel-series bionic shoulder joint
A technology of degrees of freedom and bionic shoulder, applied in the direction of manipulators, manufacturing tools, joints, etc., can solve the problems that cannot be realized, the gap in the functional characteristics of the human shoulder joint, the structural form, and the low bionic level of kinematic characteristics, etc., to achieve a large working space, static The effect of high stiffness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
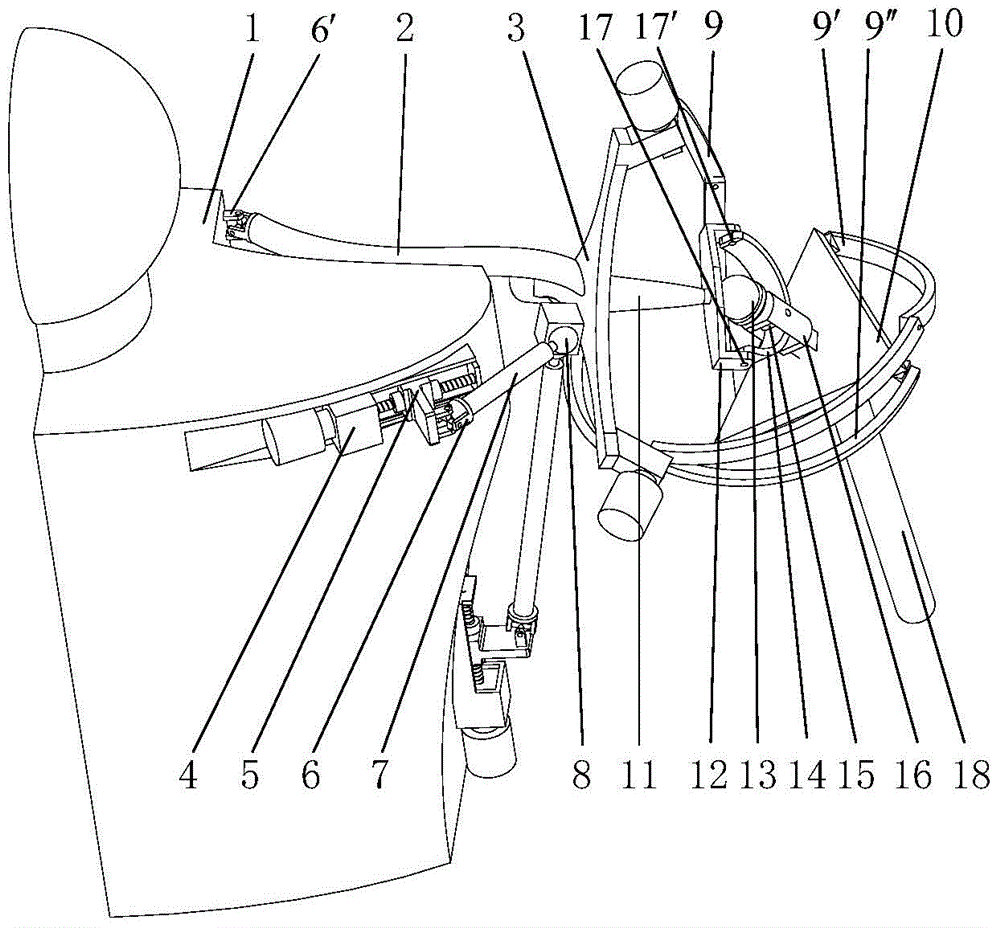
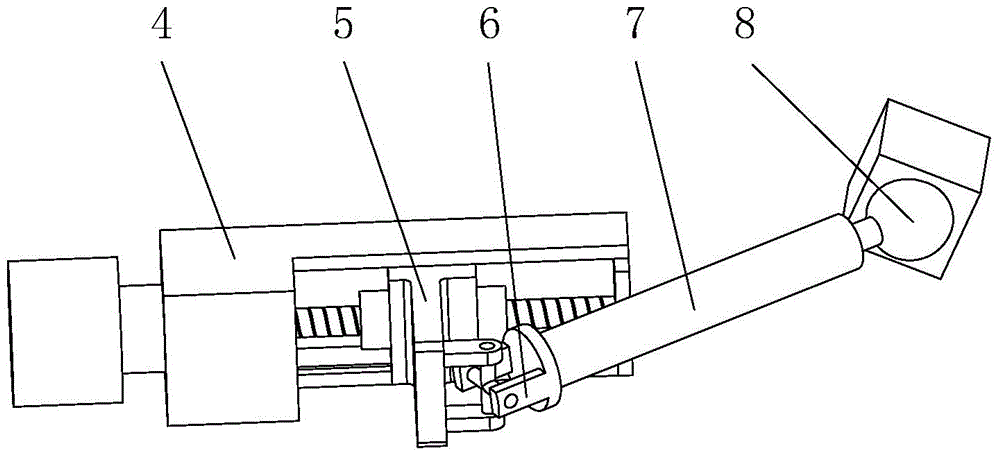
[0024] exist figure 1 In the schematic diagram of the five-degree-of-freedom parallel bionic shoulder joint shown in the figure, one end of the S-shaped connecting rod 2 in the 2-PUS+U two-degree-of-freedom parallel mechanism is connected to the bionic frame 1 through the Hooke hinge 6', and the other end is connected to the bionic frame 1. The middle moving platform 3 is fixedly connected; the horizontal motion branch chain and the vertical motion branch chain have the same structure, such as figure 2 As shown, the linear guide rail moving pair 4 of each motion branch chain is fixedly connected with the bionic frame, and the active slider 5 is set on the lead screw of the linear guide rail moving pair, and the active slider passes through the Hooke hinge 6 and the driven rod 7 The other end of the driven rod is connected with the intermediate moving platform through the spherical pair 8, the linear guide rail moving pair is the driving pair of the mechanism, the linear guide...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More