

UAV (unmanned aerial vehicle) fleet bilateral remote control system and method thereof based on vision and force sense feedback
A technology of teleoperation control and force feedback, applied in two-dimensional position/channel control, etc., can solve problems such as UAV mutual collision, information interaction, obstacle avoidance, etc., to reduce burden, improve control ability, and avoid information interaction and processing Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments.
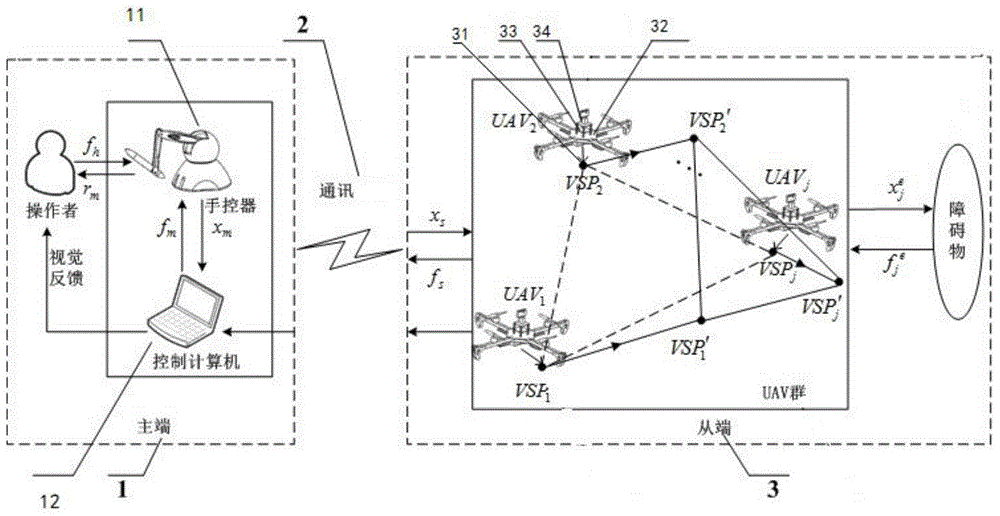
[0030] see figure 1 As shown, the UAV group bilateral teleoperation control system based on visual and force feedback includes a master terminal 1, a slave terminal 3 and a communication module 2, and the master terminal 1 includes a hand controller 11 and a control computer 12 connected to each other. The hand controller 11 includes a force feedback haptic device, which has 3 position degrees of freedom, 3 joint degrees of freedom and 3 position degrees of freedom force feedback output, and is used to move according to the operator's operation and output position information to the control computer 12; The control computer 12 outputs control signals according to the position information sent by the hand controller 11; the slave terminal 3 includes a UAV virtual agent point 31, a UAV32 group, a distance sensor 33, an image acquisition module 3...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More