

Controllable three-finger manipulator and control method thereof
A manipulator and control frame technology, applied in the field of controllable three-finger manipulator and its control, can solve the problems of limiting the sensitivity of manipulator fingers, weak functionality, poor clamping stability, etc. The effect of increasing the finger and operating space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
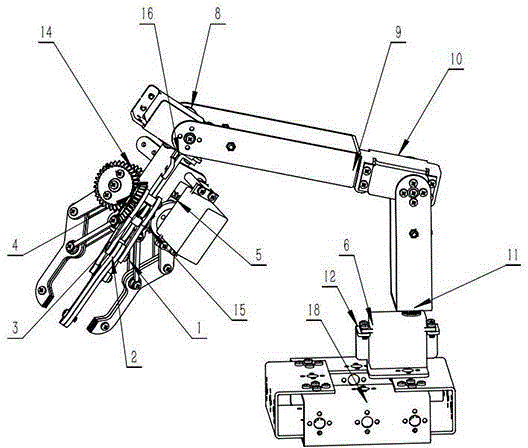
[0016] Embodiment: The present invention is a controllable three-finger manipulator. The power source is a commonly used electrical power source steering gear. The steering gear has a relatively large torque because of its own reducer. In addition, because the steering gear can only operate within a certain angle The rotation is consistent with the arm motion model, so the selection of the steering gear can reduce the design difficulty. The steering gear is composed of a rudder plate, a position feedback potentiometer, a reduction gear set, a DC motor and a control circuit. The internal position feedback reduction gear set is driven by a DC motor, and its output shaft drives a position feedback potentiometer with linear proportional characteristics as the position detection. When the rotation angle of the position feedback potentiometer is linearly converted into voltage and fed back to the control circuit, the control circuit compares the feedback signal with the input contro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More