

A flexible unit and flexible wrist for precision assembly of industrial robots
An industrial robot and flexible technology, applied in the field of mechanical wrists, can solve problems such as tearing, high processing costs, and complex processing, and achieve the effects of reducing processing and manufacturing costs, simple processing methods, and long service life
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] Below, in conjunction with accompanying drawing and specific embodiment, the present invention is described further:
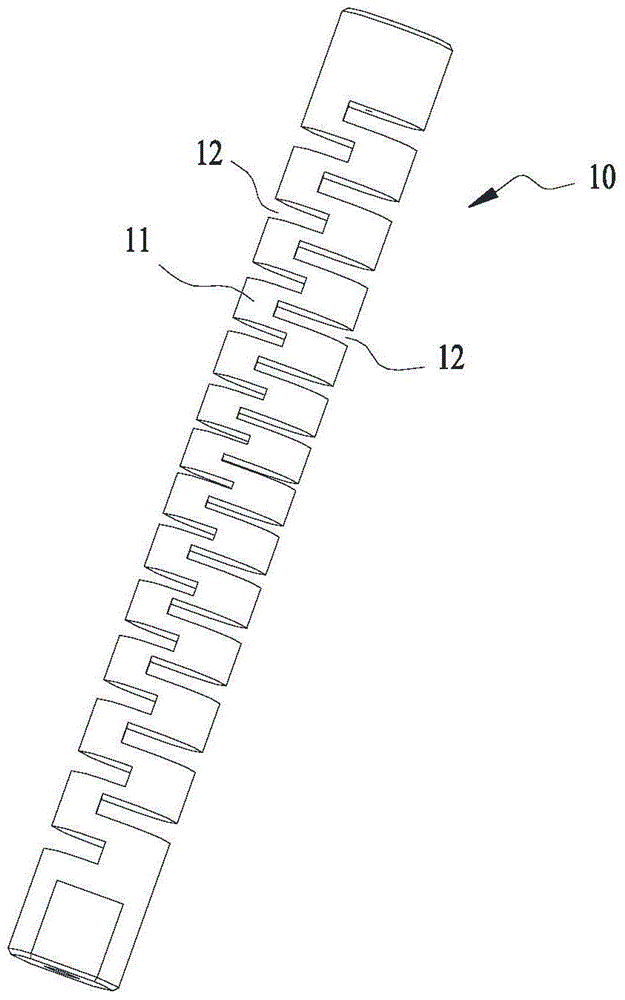
[0035] Such as figure 1 The shown flexible unit for precision assembly of industrial robots includes a strip-shaped flexible body 11, and a plurality of slots 12 are opened on the side of the flexible body 11, and each slot 12 is along the length direction of the flexible body 11. interval distribution.
[0036] The flexible body 11 can be made of metal material, and the number of slots 12 and the extending directions of the slots 12 can be set correspondingly according to the design requirements of flexibility. In order to make the flexible unit 10 have uniform flexibility in all directions, the following settings can be made in this example:
[0037] The slots 12 are alternately distributed on opposite sides of the flexible body 11 . The distances between adjacent slots 12 are equal, the slot widths of each slot 12 are equal, and the slot depths of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More