

Perpendicular rope climbing patrolling robot in ultra-deep vertical shaft steel-rope guide
A technology of steel wire rope tank road and inspection robot, which is applied in the field of inspection robot, can solve the problems of vertical, circumferential and radial deformation of the wellbore, and achieve the effect of comprehensive control, increasing the scope of application, and increasing friction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further explained below in conjunction with the accompanying drawings.
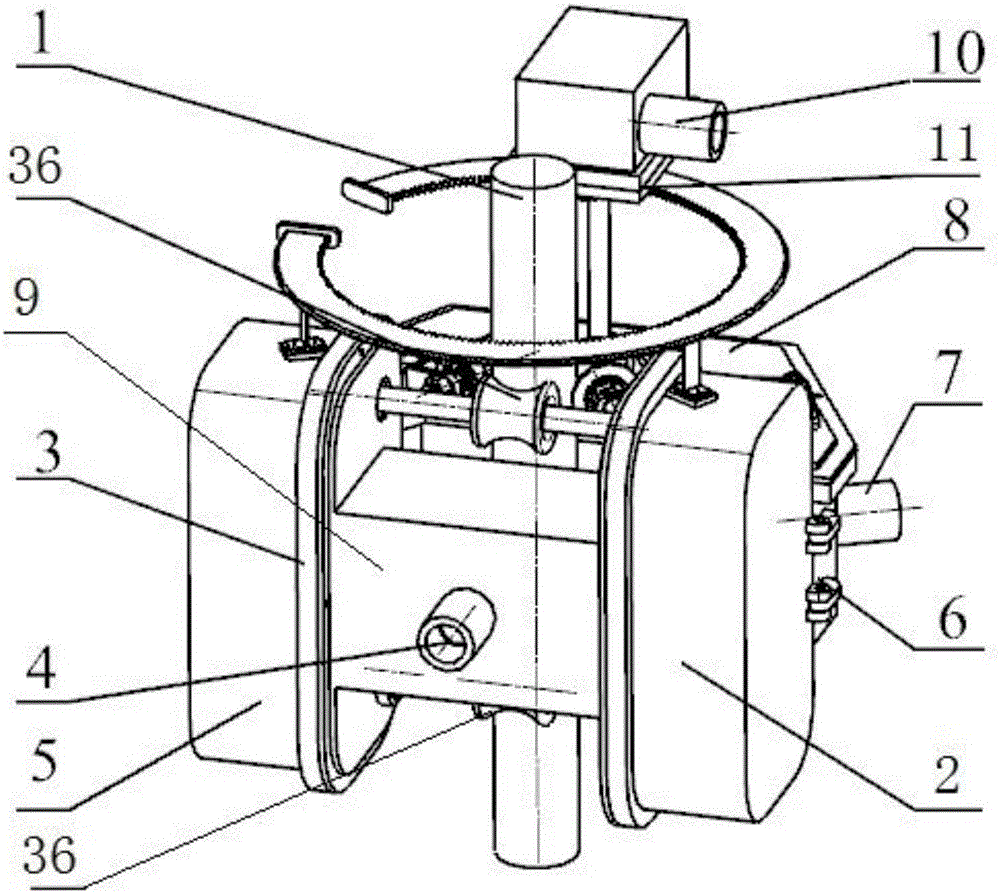
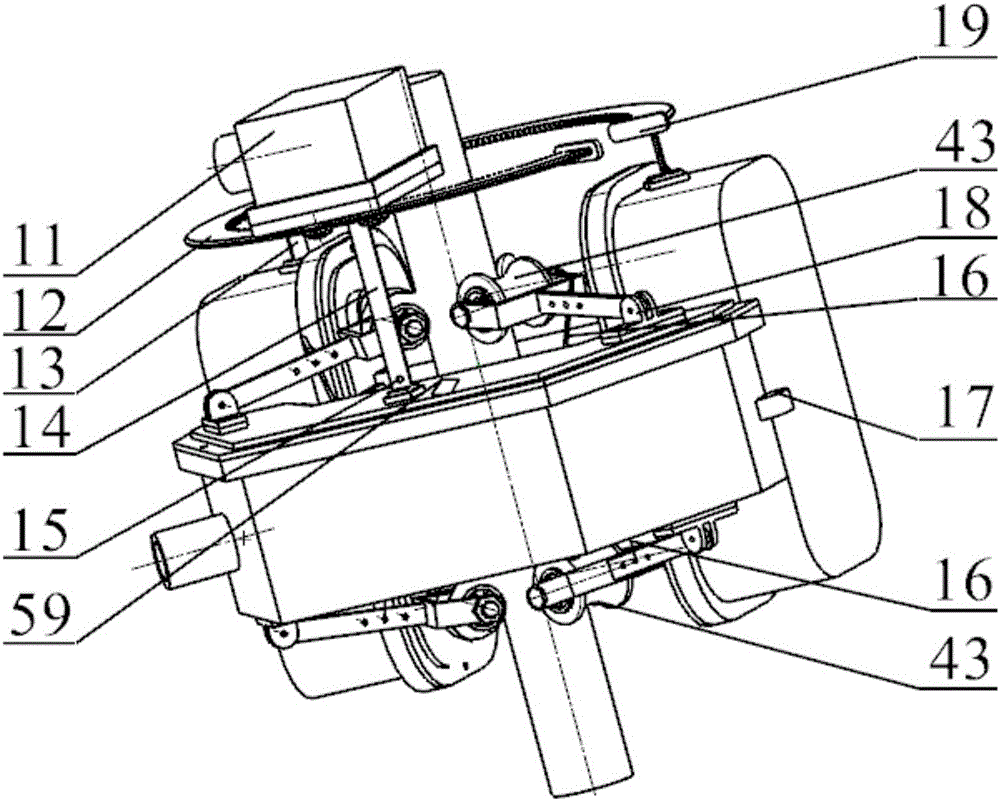
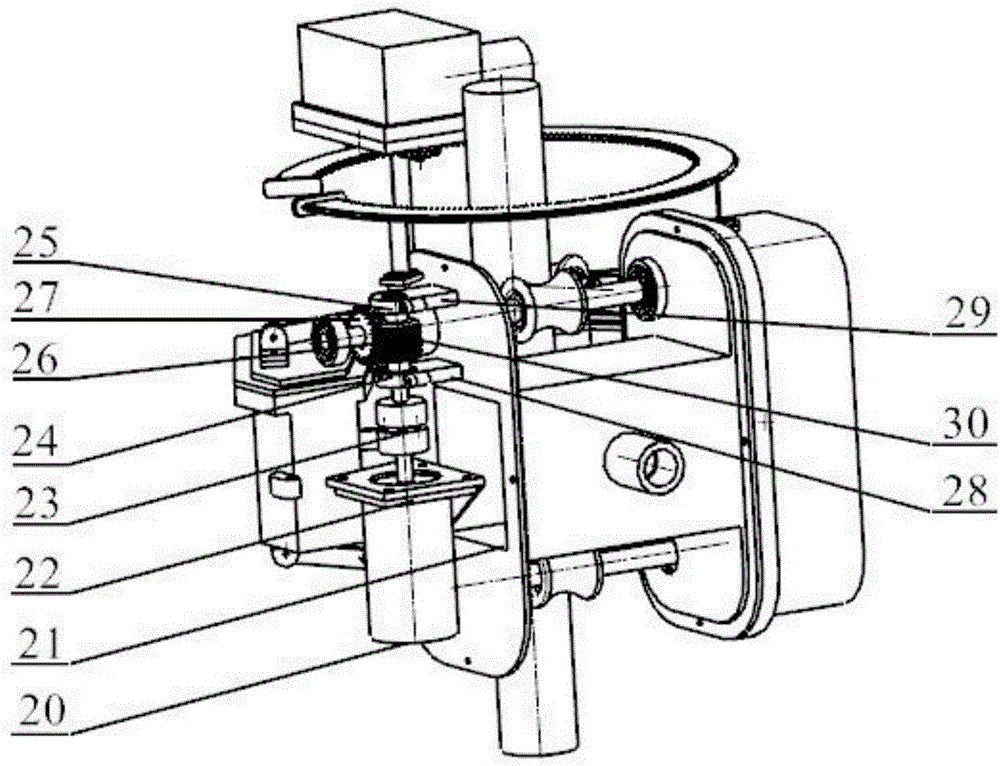
[0036] Such as figure 1 and 2 As shown, the ultra-deep shaft steel wire rope tank road roller type rope climbing inspection robot of the present invention includes an explosion-proof casing, a driving mechanism, a roller mechanism, a clamping mechanism 16, a carrying mechanism, an electric control device and an introduction device.
[0037] The flameproof enclosure includes an upper drive enclosure 2 , a lower drive enclosure 5 , a driver enclosure 9 , an electrical control device enclosure 8 and a carrying mechanism enclosure 11 . The upper drive shell 2 and the lower drive shell 5 are arranged symmetrically at both ends of the drive shell 9, and the drive shell 9 is connected to the upper drive shell 2 and the lower drive shell 5 through an explosion-proof flange 3, and one end of the electric control device shell 8 is connected to the lower drive shell 5 Connected...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More