

Bionic hopping robot driven by internal combustion engine
An internal combustion engine and robot technology, applied in the field of bionic jumping robots, can solve the problems of difficulty in carrying people and load, low energy utilization rate, poor bionic performance, etc., and achieves improvement of insufficient connection strength, optimization of structural arrangement, sole toughness and buffer vibration absorption. Ability-enhancing effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
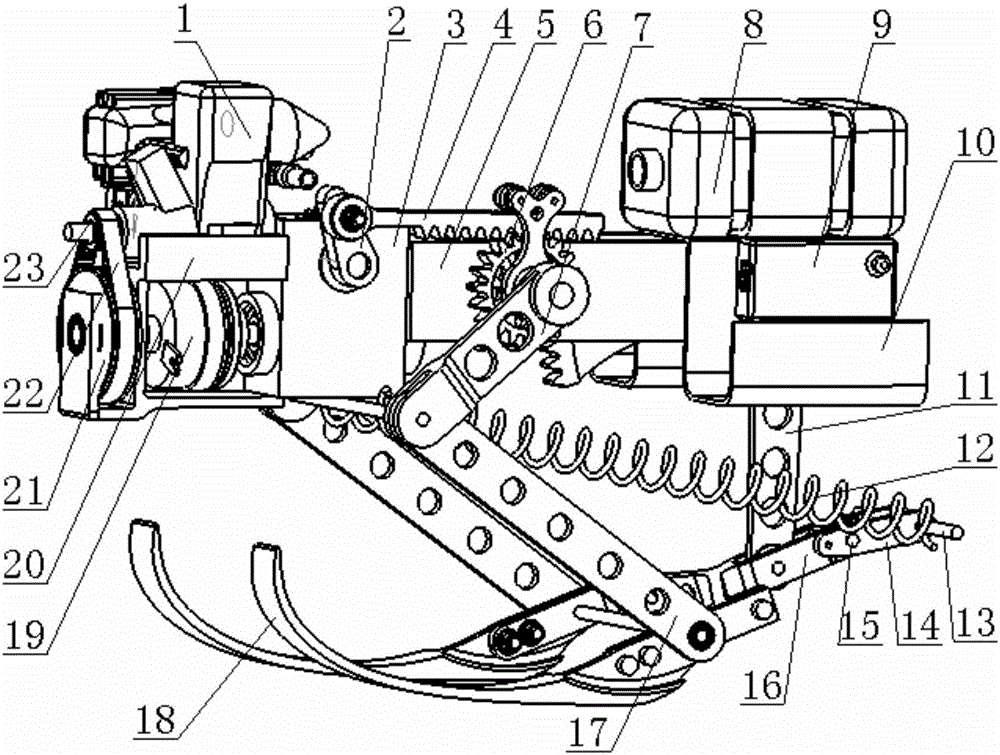
[0022] This embodiment is a bionic jumping robot driven by an internal combustion engine.
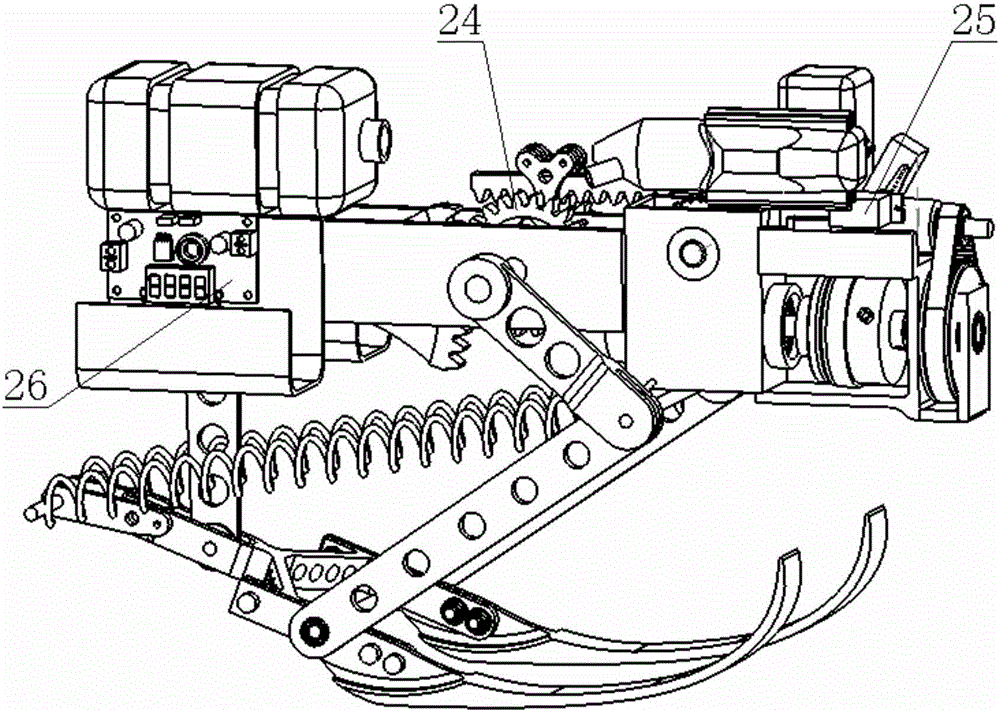
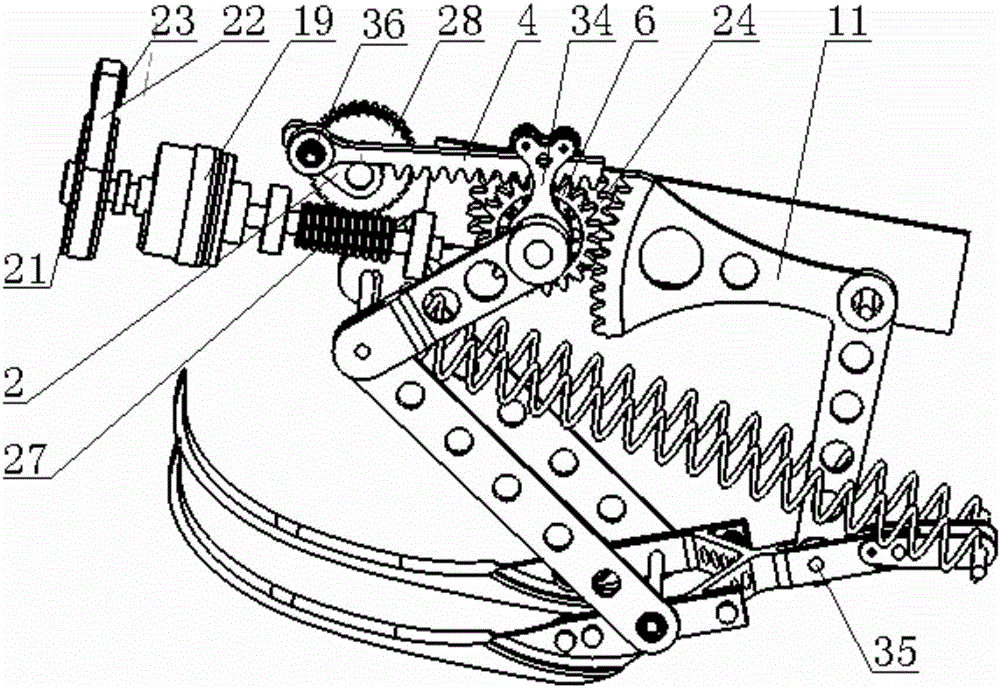
[0023] refer to Figure 1 to Figure 4 , the jumping robot of the present embodiment adopts the closed-chain gear five-bar mechanism to imitate the skeleton of the biological open chain, realizes the transformation of force characteristics, and imitates the kangaroo jumping motion characteristic to optimize the transmission mechanism and the size of the jumping mechanism; the size of the jumping mechanism: frame, thigh, shank, The length ratio of the jumping auxiliary frame and the gear rod is 1:0.6:1.2:0.5:0.8. Imitating the mechanism of the kangaroo jumping with a low overall center of mass but a strong obstacle-crossing ability, the optimization adopts the method of quickly swinging the soles of the feet back after take-off to achieve a high distance from the soles of the feet to the ground and improve the obstacle-crossing performance.
[0024] The jumping robot is made up of transm...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More