

Parallel ankle rehabilitation robot and control method thereof
A rehabilitation robot, ankle joint technology, applied in gymnastics equipment, passive exercise equipment, sports accessories, etc., can solve the problems of poor compliance, limited rehabilitation effect, small range of motion, etc., to ensure flexibility and continuity, improve rehabilitation Training effect, improve the effect of active participation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] In order to facilitate the understanding of those skilled in the art, the present invention will be further described below in conjunction with the accompanying drawings.
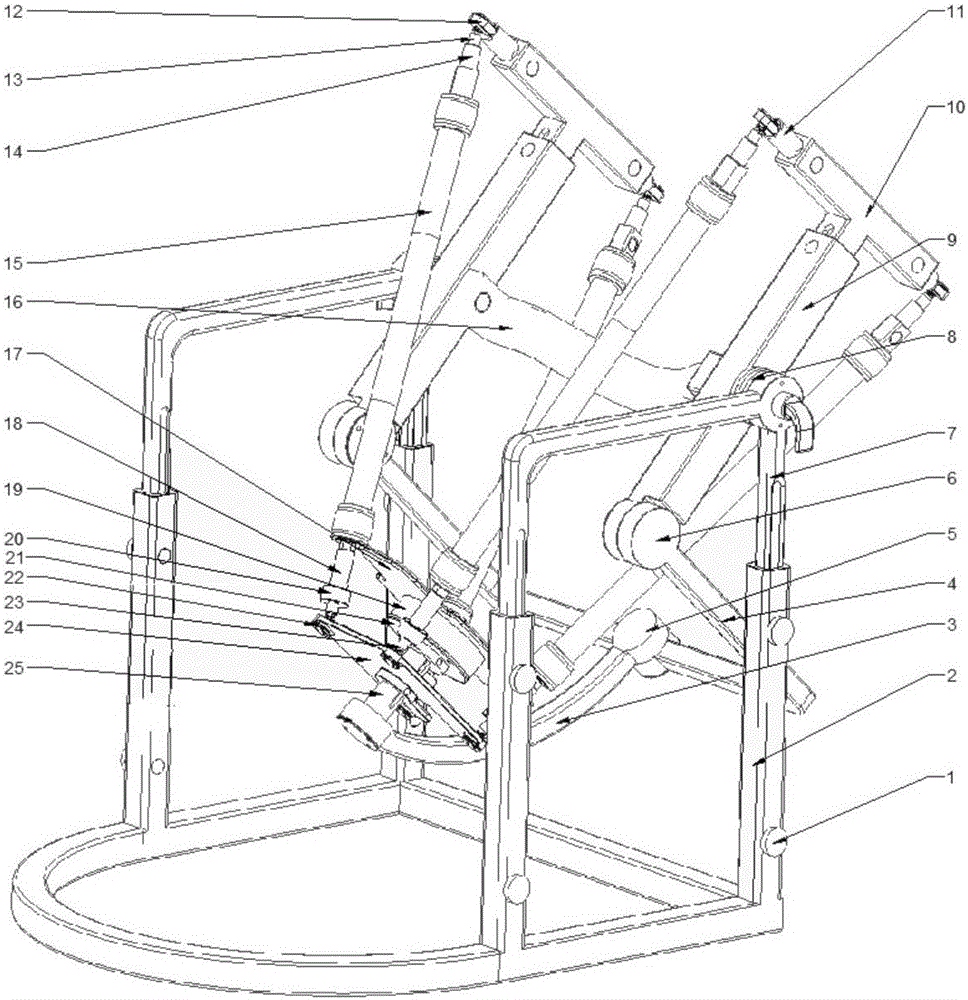
[0040] as attached Figure 1~5 As shown, one aspect of the present invention discloses a parallel ankle joint rehabilitation robot, including a base 2, a support frame 7 is inserted on the base 2, and an adjustment mechanism is movable on the support frame 7, and the adjustment mechanism includes a main rod 9. The forearm rod 10 and the leg support rod 16, the front end of the main rod 9 is connected to the forearm rod 10, the leg support rod 16 is connected to the main rod 9, and the leg support rod 16 is generally attached to the main rod 9 In the middle position, the forearm rod 10 is equipped with a connecting rod 11, and the main rod 9 is movably clamped with the support frame 7; it also includes an adjustment mechanism and a movement mechanism, the front end of the driving mechanism is connecte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More