

Reliable indoor mobile robot precise navigation positioning system and method
A mobile robot, navigation and positioning technology, applied in the field of positioning and navigation systems for indoor mobile robots, can solve the problems that the positioning technology of mobile robots has not yet achieved satisfactory results, and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
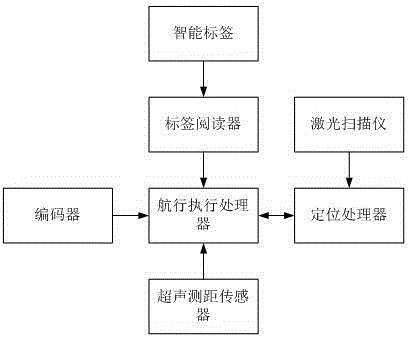
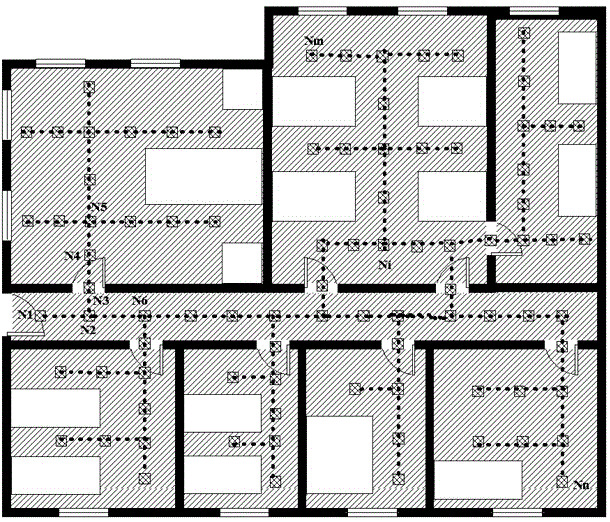
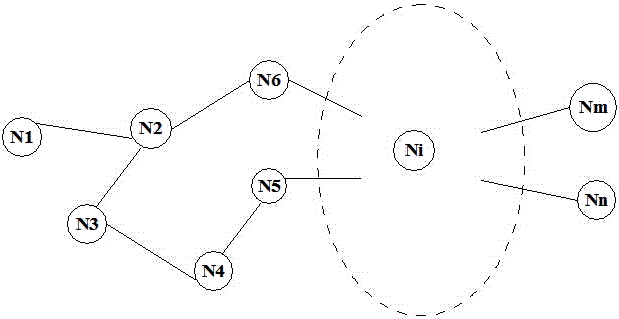
[0023] Such as Figure 1-3 As shown, a reliable indoor mobile robot precise navigation and positioning system of the present invention includes: RFID topological point layout and positioning subsystem, ultrasonic ranging guidance subsystem and laser positioning subsystem.
[0024] Among them, the RFID topological point distribution and positioning subsystem consists of smart labels arranged according to the topological map and a label reader installed at the bottom of the robot; the ultrasonic ranging guidance subsystem consists of ultrasonic ranging sensors installed on the left and right sides of the robot, and installed on the The encoder on the moving wheel of the robot and the navigation execution processor; the laser positioning subsystem includes a laser scanner and a positioning processor installed on the top of the robot; the coded signal corresponding to the topological position information and the local environment information is stored in the smart label; The tag r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More