

Adaptive Tracking Controller and Method for Overhead Crane with Tracking Error Constraint
An adaptive tracking and tracking error technology, applied in the direction of load hanging components, transportation and packaging, can solve the problem of trajectory planning neglect, inability to eliminate swing, the core index trolley maximum speed/acceleration trolley work efficiency cannot be theoretically Guaranteed and other issues to achieve the effect of easy engineering implementation, good control performance, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] Below in conjunction with accompanying drawing and example the present invention will be further described:
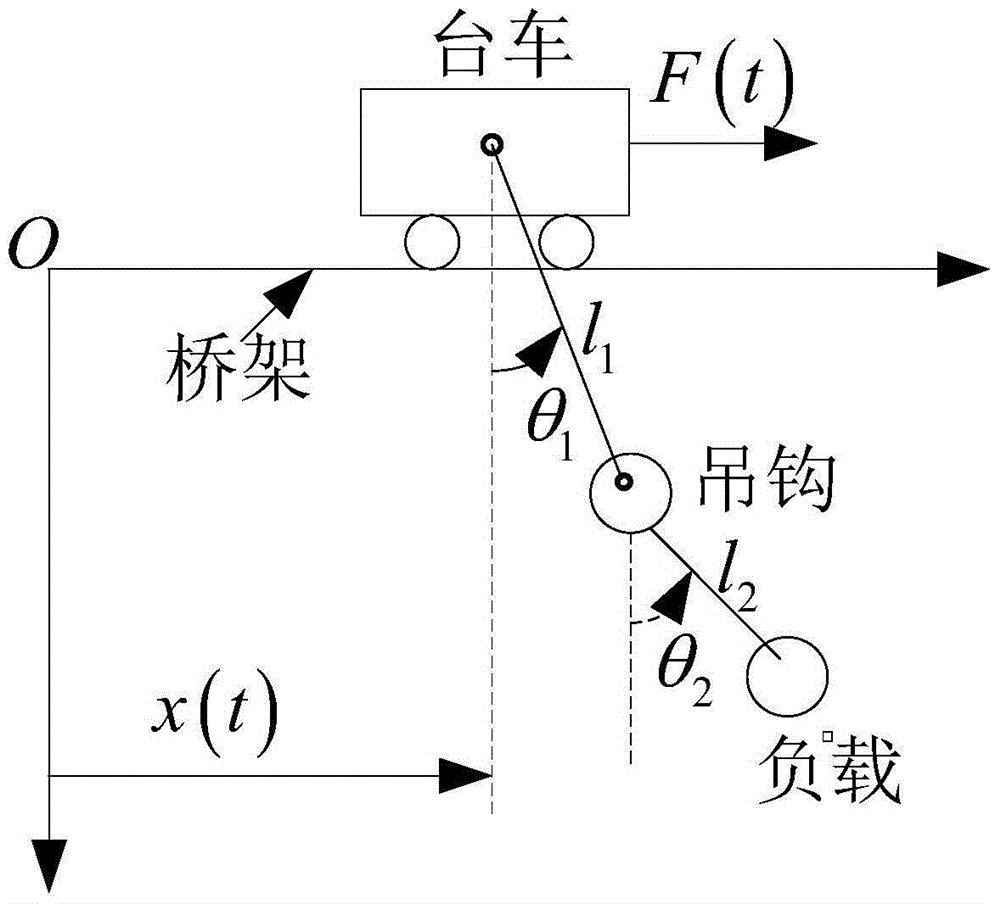
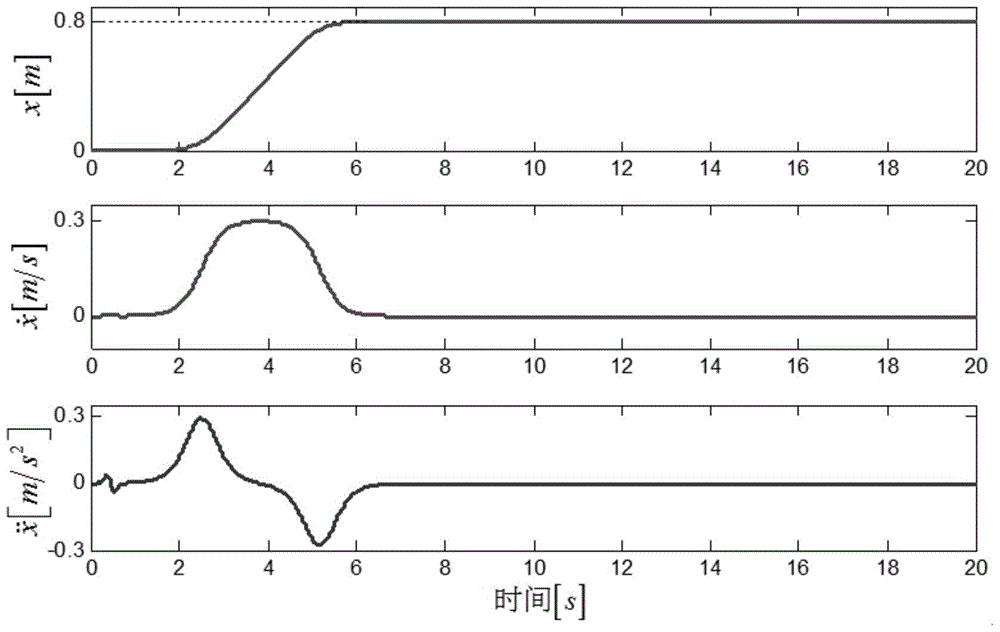
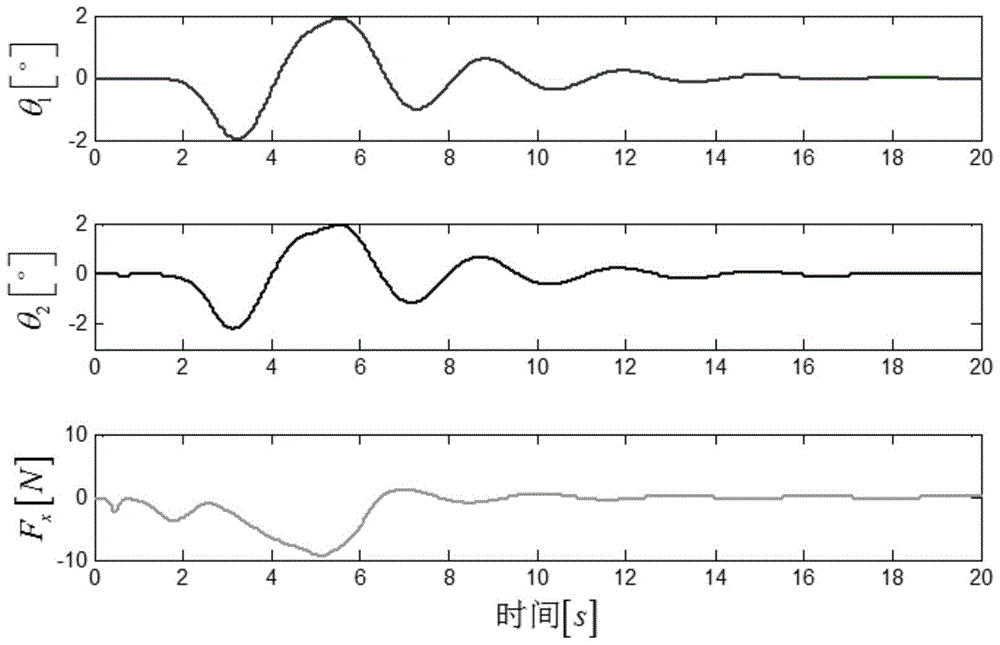
[0059] The invention proposes an adaptive tracking control method for a two-stage pendulum type bridge crane system that can ensure that the tracking error is constrained. Specifically, in order to ensure that the trolley runs smoothly to the target position, a smooth S-shaped curve is selected for the trolley. Then, using the viewpoint of energy shaping, a new energy storage function is constructed, and on this basis, an adaptive tracking control method is proposed. Finally, in order to ensure that the tracking error of the trolley is always within the allowable range, an additional term is added to the designed controller. The stability of the closed-loop system at the equilibrium point is rigorously analyzed using the Lyapunov method and Barbalat's lemma. Simulation results show that the proposed control algorithm can ensure that the tracking error of the t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More